Siemens SINAMICS G110M Instrucciones De Servicio
Ocultar thumbs
Ver también para SINAMICS G110M:
- Instrucciones de servicio (438 páginas) ,
- Primeros pasos (108 páginas) ,
- Instrucciones de instalación (2 páginas)
Tabla de contenido
Publicidad
Enlaces rápidos
Publicidad
Tabla de contenido

Manuales relacionados para Siemens SINAMICS G110M









Resumen de contenidos para Siemens SINAMICS G110M
-
Página 3: Variador Distribuido Para Motorreductores Simogear
___________________ Cambios en este manual Consignas básicas de ___________________ seguridad ___________________ SINAMICS Introducción ___________________ Descripción SINAMICS G110M Variador distribuido para ___________________ motorreductores SIMOGEAR Instalación ___________________ Puesta en marcha Instrucciones de servicio ___________________ Puesta en marcha avanzada ___________________ Copia de seguridad de datos... - Página 4 Considere lo siguiente: ADVERTENCIA Los productos de Siemens sólo deberán usarse para los casos de aplicación previstos en el catálogo y la documentación técnica asociada. De usarse productos y componentes de terceros, éstos deberán haber sido recomendados u homologados por Siemens. El funcionamiento correcto y seguro de los productos exige que su transporte, almacenamiento, instalación, montaje, manejo y mantenimiento hayan sido realizados de forma...
-
Página 5: Cambios En Este Manual
STARTER. Si el usuario necesita la descripción del software STARTER, consulte las versiones anteriores de este manual. Versión anterior del manual (https://support.industry.siemens.com/cs/ww/it/view/109751325) Correcciones ● Información revisada: reducción de corriente en función de la altitud de instalación: Reducción de intensidad en función de la altitud de instalación (Página 372) - Página 6 Cambios en este manual Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 7: Tabla De Contenido
Acerca del manual ........................23 Descripción ............................27 Identificación de los componentes del sistema ..............27 Variador SINAMICS G110M ....................29 Disposición general del sistema SINAMICS G110M .............. 32 Directivas y normas ........................ 37 Instalación ............................39 Instalación mecánica ......................40 Instalación del sistema...................... - Página 8 Índice 4.4.3 PROFIBUS ..........................94 4.4.3.1 Integración del convertidor en PROFIBUS ................94 4.4.3.2 ¿Cómo se configura la comunicación vía PROFIBUS? ............94 4.4.3.3 Instalación de GSD ........................ 95 4.4.3.4 Ajustar dirección........................95 4.4.4 Comunicaciones a través de AS-i ..................97 4.4.4.1 Ajuste de la dirección ......................
- Página 9 Índice 6.5.3 Palabra de mando y de estado 1 ..................165 6.5.4 Palabra de mando y de estado 3 ..................167 6.5.5 Palabra de aviso NAMUR ..................... 169 6.5.6 Canal de parámetros ......................170 6.5.7 Ejemplos de aplicación del canal de parámetros ..............174 6.5.8 Ampliación de telegrama ......................
- Página 10 Índice 6.15.6 Consigna fija de velocidad como fuente de consigna............234 6.16 Cálculo de consignas ......................237 6.16.1 Resumen ..........................237 6.16.2 Inversión de consigna ......................238 6.16.3 Bloqueo del sentido de giro ....................239 6.16.4 Bandas inhibidas y velocidad mínima .................. 240 6.16.5 Limitación de velocidad ......................
- Página 11 Prestaciones nominales del Control Module - CU240M ............367 10.2 Prestaciones nominales del Power Module - PM240M ............368 10.3 Especificaciones del SINAMICS G110M ................369 10.4 Temperatura ambiente de funcionamiento ................371 10.5 Reducción de intensidad en función de la altitud de instalación .......... 372 10.6...
- Página 12 Índice A.2.1 Conceptos básicos ....................... 386 A.2.2 Ejemplo de aplicación ......................388 Pruebas de recepción/aceptación para las funciones de seguridad ........390 A.3.1 Prueba de recepción recomendada ..................390 A.3.2 Prueba de aceptación de STO (funciones básicas) ............391 A.3.3 Documentación de máquinas ....................
-
Página 13: Consignas Básicas De Seguridad
Consignas básicas de seguridad Consignas generales de seguridad ADVERTENCIA Descarga eléctrica y peligro de muerte por otras fuentes de energía Tocar piezas que están bajo tensión puede provocar lesiones graves o incluso la muerte. • Trabaje con equipos eléctricos solo si tiene la cualificación para ello. •... - Página 14 Consignas básicas de seguridad 1.1 Consignas generales de seguridad ADVERTENCIA Peligro de descarga eléctrica y de incendio en caso de red con impedancia insuficiente Las corrientes de cortocircuito demasiado altas pueden provocar que los dispositivos de protección no puedan interrumpirlas y resulten dañados y, en consecuencia, se produzca una descarga eléctrica o un incendio.
- Página 15 Consignas básicas de seguridad 1.1 Consignas generales de seguridad ADVERTENCIA Descarga eléctrica por pantallas de cables no contactadas El sobreacoplamiento capacitivo puede suponer un peligro mortal por tensiones de contacto si las pantallas de cable no están contactadas. • Contacte las pantallas de los cables y los conductores no usados de los cables de potencia (p.
- Página 16 • Desconecte los equipos radioeléctricos o teléfonos móviles cuando se acerque a menos de 2 m de los componentes. • Utilice la "App de SIEMENS Industry Online Support" solo si está desconectado el equipo. Variador distribuido para motorreductores SIMOGEAR...
- Página 17 Consignas básicas de seguridad 1.1 Consignas generales de seguridad ATENCIÓN Daños en el aislamiento del motor debidos a tensiones excesivas Si un motor se usa en redes con fase a tierra o si, usado en una red IT, se produce un defecto a tierra, puede dañarse el aislamiento del devanado del motor debido a una mayor tensión a tierra.
- Página 18 Consignas básicas de seguridad 1.1 Consignas generales de seguridad ADVERTENCIA Movimiento inesperado de máquinas por funciones de seguridad inactivas Las funciones de seguridad inactivas o no adaptadas pueden provocar movimientos inesperados en las máquinas que podrían causar lesiones graves o incluso la muerte. •...
-
Página 19: Daños En El Equipo Por Campos Eléctricos O Descarga Electrostática
Consignas básicas de seguridad 1.2 Daños en el equipo por campos eléctricos o descarga electrostática Daños en el equipo por campos eléctricos o descarga electrostática Los ESD son componentes, circuitos integrados, módulos o equipos susceptibles de ser dañados por campos o descargas electrostáticas. ATENCIÓN Daños en el equipo por campos eléctricos o descarga electrostática Los campos eléctricos o las descargas electrostáticas pueden provocar fallos en el... -
Página 20: Seguridad Industrial
Seguridad industrial (http://www.siemens.com/industrialsecurity) Los productos y las soluciones de Siemens están sometidos a un desarrollo constante con el fin de mejorar todavía más su seguridad. Siemens recomienda expresamente realizar actualizaciones tan pronto como estén disponibles y utilizar únicamente las últimas versiones de los productos. - Página 21 Consignas básicas de seguridad 1.4 Seguridad industrial ADVERTENCIA Estados operativos no seguros debidos a una manipulación del software Las manipulaciones del software (p.ej., virus, troyanos, malware, gusanos) pueden provocar estados operativos inseguros en la instalación, con consecuencias mortales, lesiones graves o daños materiales. •...
-
Página 22: Riesgos Residuales De Sistemas De Accionamiento (Power Drive Systems)
Consignas básicas de seguridad 1.5 Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Durante la evaluación de riesgos de la máquina que exige la normativa local (p. ej., Directiva de máquinas CE), el fabricante de la máquina o el instalador de la planta deben tener en cuenta los siguientes riesgos residuales derivados de los componentes de control y accionamiento de un sistema de accionamiento: 1. - Página 23 Consignas básicas de seguridad 1.5 Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Si desea más información sobre los riesgos residuales que se derivan de los componentes de un sistema de accionamiento, consulte los capítulos correspondientes de la documentación técnica para el usuario. Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 24 Consignas básicas de seguridad 1.5 Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 25: Introducción
Introducción Acerca del manual ¿Quién necesita estas instrucciones de servicio, y para qué? Estas instrucciones de servicio van dirigidas fundamentalmente a instaladores, responsables de puesta en marcha y operadores de máquina. Estas instrucciones de servicio describen los equipos y sus componentes y capacitan a los destinatarios para montar, conectar, ajustar y poner en marcha el convertidor de manera correcta y sin peligro. - Página 26 Introducción 2.1 Acerca del manual Capítulo En este capítulo encontrará respuestas a las siguientes preguntas: ¿Cómo está identificado el convertidor? • Descripción (Página 27) ¿Cuáles son los componentes del convertidor? • ¿Qué componentes opcionales existen para el convertidor? • ¿Qué finalidad tienen los componentes opcionales? •...
- Página 27 Introducción 2.1 Acerca del manual Capítulo En este capítulo encontrará respuestas a las siguientes preguntas: ¿Qué datos técnicos tiene el convertidor? • Datos técnicos (Pági- ¿Qué significan "High Overload" y "Low Overload"? na 367) • ¿Qué novedades contiene el firmware actual? •...
- Página 28 Introducción 2.1 Acerca del manual Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
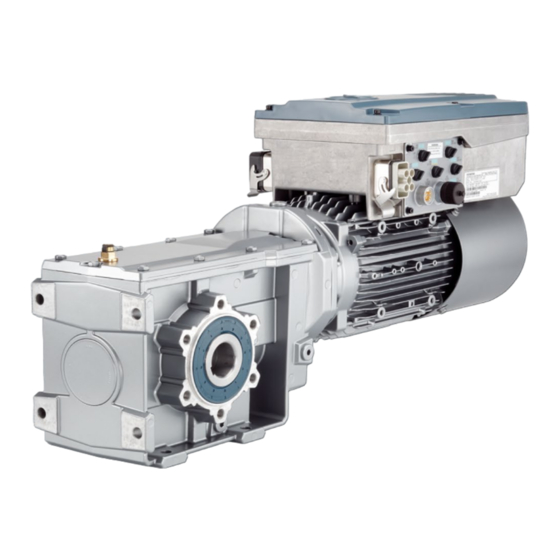
Página 29: Descripción
OpenSSL (https://www.openssl.org/) Cryptsoft (mailto:eay@cryptsoft.com) Identificación de los componentes del sistema El SINAMICS G110M es un sistema completo de variadores para regular la velocidad de un motor trifásico. La figura siguiente muestra todas las partes del sistema. Variador distribuido para motorreductores SIMOGEAR... - Página 30 Descripción 3.1 Identificación de los componentes del sistema Figura 3-1 Identificación de los componentes del sistema Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 31: Variador Sinamics G110M
Descripción 3.2 Variador SINAMICS G110M Variador SINAMICS G110M Resumen El sistema SINAMICS G110M consta de los siguientes componentes: Caja de bornes La caja TH actúa como conexión entre el G110M y el TH (por sus motor. La caja TH sustituye a la caja de bornes normal siglas en in- del motor. - Página 32 Descripción 3.2 Variador SINAMICS G110M Los Power Modules están dimensionados para un rango de potencia específico y las cajas TH están diseñadas para funcionar en motores específicos. La caja TH no solo permite el montaje directo sobre un motor, sino que también se especifican pasacables y conectores de red concretos.
- Página 33 FS100/112 HanQ 4/2 / 7/8" 6SL3544-0QB02-1MA0 Todos los SINAMICS G110M se suministran con los siguientes accesorios: Todas las variantes ● Cable de conexión PTC: es el cable de extensión utilizado para conectar los cables PTC desde el motor hasta la conexión de la tarjeta CPI.
-
Página 34: Motores Compatibles Para El Sistema Sinamics G110M
SINAMICS G110M está dimensionado para el montaje en motorreductores SIMOGEAR. Es compatible con motores en tamaños del 71 al 112. Encontrará un resumen de los motores que pueden utilizarse con SINAMICS G110M en combinación con SIMOGEAR en la FAQ 1097385577 en el siguiente enlace: FAQ 1097385577 (https://support.industry.siemens.com/cs/ww/es/view/109738577/en) - Página 35 Descripción 3.3 Disposición general del sistema SINAMICS G110M conectores HANQ o con pasacables y conexiones en el interior, en función de la variante que se haya solicitado. Figura 3-2 Disposición general del sistema: todas las variantes excepto CU240M AS-i Variador distribuido para motorreductores SIMOGEAR...
- Página 36 Descripción 3.3 Disposición general del sistema SINAMICS G110M Tabla 3- 4 Descripción y ubicación de las interfaces Pro- Descripción Pro- Descripción duc- duc- Power Module Tapa: para hermetizar el lado opuesto de la caja de bor- nes desde la que se ha instalado la CPI.
- Página 37 Descripción 3.3 Disposición general del sistema SINAMICS G110M Figura 3-3 Disposición general de SINAMICS G110M ASi Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 38 Descripción 3.3 Disposición general del sistema SINAMICS G110M Tabla 3- 5 Descripción y ubicación de las interfaces Descripción Descripción LED de estado Conexión AS-i y alimentación AUX Conexión óptica de E/S Entradas digitales 0 y 1 Potenciómetro Conexión de alimentación de red Conexión mini USB...
-
Página 39: Directivas Y Normas
Descripción 3.4 Directivas y normas Directivas y normas Directivas y normas pertinentes Para el convertidor son importantes las siguientes directivas y normas: Directiva europea de baja tensión El convertidor cumple los requisitos de la Directiva de baja tensión 2014/35/UE siempre que entre en el ámbito de aplicación de dicha directiva. -
Página 40: Certificados Descargables
Resistencia a la caída de tensión en línea de equipamiento de proceso de semiconductores Los convertidores cumplen los requisitos de la norma SEMI F47-0706. Sistemas de calidad Siemens AG utiliza un sistema de gestión de calidad que cumple los requisitos de ISO 9001 e ISO 14001. Certificados descargables ●... -
Página 41: Instalación
Instalación PELIGRO El funcionamiento con redes no conectadas a tierra (IT) puede provocar situaciones muy peligrosas El variador debe estar siempre puesto a tierra. Si la puesta a tierra del variador no es correcta, se pueden dar situaciones muy peligrosas dentro del variador, que podrían tener un resultado potencialmente fatal. -
Página 42: Instalación Mecánica
Instalación 4.1 Instalación mecánica Instalación mecánica Dimensiones del sistema El variador está disponible en dos tamaños: el tamaño A (FSA) y el tamaño B (FSB). En la figura y la tabla siguientes se indican las dimensiones de cada uno. Figura 4-1 Dimensiones del variador Tabla 4- 1 Dimensiones del variador... -
Página 43: Dimensiones Del Motor
Instalación 4.1 Instalación mecánica Dimensiones de la caja TH y puntos de fijación La caja TH del sistema G110M sustituye la caja de bornes existente en el motor conectado. Hay tres tipos de cajas TH, que se muestran en la figura siguiente. Las tres cajas TH tienen las mismas dimensiones externas: ●... - Página 44 ● El catálogo de sistema relevante, por ejemplo, el catálogo SINAMICS G120. ● El catálogo de motor relevante. ● La aplicación de software online "Configurator" de Siemens para dimensionar motores (Configurador de motores Siemens (https://eb.automation.siemens.com/goos/catalog/Pages/ProductData.aspx?catalogRegio n=WW&nodeid=10028832&tree=CatalogTree®ionUrl=/&autoopen=false&language=e s&activetab=config#topAnch&activetab=config&))
-
Página 45: Orientación De Montaje
Instalación 4.1 Instalación mecánica Figura 4-4 Ejemplo de datos disponibles del programa Sizer Orientación de montaje El sistema G110M está diseñado para funcionar en cualquier orientación, en función de la configuración de montaje del motor. Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 46: Instalación Del Sistema
Instalación del sistema Resumen SINAMICS G110M se suministra en general como un sistema completo que consta de un Power Module, una caja TH (con el Control Module incluido) y un motor/motorreductor. Cuando se suministra como un sistema completo, se entrega totalmente montado, y lo único que se precisa es el cableado externo del sistema. - Página 47 Instalación 4.2 Instalación del sistema Para realizar el montaje completo del sistema se deben ejecutar los procedimientos que se describen en los siguientes apartados. PELIGRO Riesgo de descarga eléctrica Cuando el variador y el motor reciben alimentación, en los componentes eléctricos del sistema hay presentes unas tensiones muy altas;...
-
Página 48: Procedimiento De Desmontaje
Nota Utilice solo configuraciones de motor en el lado contrario al accionamiento (LCA) El SINAMICS G110M se ha diseñado para usarse combinado con motores LCA. No use montajes estándar de cajas de bornes para motores con los sistemas SINAMICS G110M. - Página 49 Instalación 4.2 Instalación del sistema 3. Desmontaje del Control Module 1. Afloje los cuatro tornillos autoblocantes que fijan el Control Module. 2. Saque cuidadosamente el Control Module de la caja de conexiones. Nota: Los tornillos que fijan el Control Module son de tipo imperdible y no se pueden retirar completamente de la carcasa del Con- trol Module.
-
Página 50: Procedimiento De Instalación
Instalación 4.2 Instalación del sistema Procedimiento de instalación Tras el desmontaje de la caja de bornes de SINAMICS G110M, siga este procedimiento para finalizar la instalación del sistema completo. 1. Conexión en estrella y triángulo Configure los bornes de motor dependiendo del consumo de tensión y de la tensión de entrada de la red de la aplicación... - Página 51 Motores LA/LE para montaje en reductores SIMOGEAR (http://support.automation.siemens.com/WW/view/es/60666 508). • Si solicita SINAMICS G110M como sistema completo, la instalación mecánica y eléctrica completa se realiza en la fábrica antes del suministro. Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 52 Instalación 4.2 Instalación del sistema 4. Conexión del cable de puesta a tierra del motor a la caja de conexiones 1. Pase el cable de puesta a tierra del motor a través de la caja de conexiones. 2. Fije el cable de puesta a tierra del motor al perno de puesta a tierra de la caja de conexiones (1,5 Nm).
- Página 53 2. Apriete el tornillo de puesta a tierra con 1,5 Nm. Nota: Si solicita SINAMICS G110M como sistema completo, la insta- lación mecánica y eléctrica completa se realiza en la fábrica antes del suministro.
- Página 54 Instalación 4.2 Instalación del sistema 9. Conexión de los cables de red (variante HANQ) 1. Asegúrese de haber retirado la abrazadera del cable. 2. Conecte las conexiones HANQ L1, L2 y L3 a las conexiones L1, L2 y L3 de la conexión de red. 3.
- Página 55 Instalación 4.2 Instalación del sistema 11. Conexión de los cables de paso (variante con pasacables) En la variante con pasacables, la transmisión se realiza si- guiendo otro método. Los bornes de la caja de conexiones L1, L2 y L3 requieren el emborne de dos cables en cada borne;...
- Página 56 Instalación 4.2 Instalación del sistema 13. Colocación de la placa de cubierta 1. Monte la placa de cubierta en el lado de la caja de conexiones usando los cuatro tornillos. 2. Asegúrese de que no queda aprisionado ningún cable o componente entre la placa de cubierta y la junta de la caja de conexiones.
- Página 57 Instalación 4.2 Instalación del sistema 16. Conexiones finales y ajustes 1. Enchufe el conector del sensor de temperatura del motor al conector del borde superior del CPI. 2. Enchufe el conector de comunicación pequeño al conector del lado superior del CPI. 3.
- Página 58 (FAQ) del siguiente enlace: Alimentación de 24 V conmutada y no conmutada (http://support.automation.siemens.com/WW/view/es/26986267) Una vez finalizada la instalación del sistema, pueden realizarse las conexiones eléctricas externas. Variador distribuido para motorreductores SIMOGEAR...
-
Página 59: Instalación De La Fuente De Alimentación De 24 V
Instalación 4.2 Instalación del sistema Instalación eléctrica (Página 61) Puesta a tierra de la caja TH Para asegurarse de que el variador esté correctamente puesto a tierra y protegido, se DEBE montar un cable de puesta a tierra a la caja TH del sistema G110M. ●... -
Página 60: Restricciones
Instalación 4.2 Instalación del sistema En la parte inferior de la carcasa de la PSU de 24 V hay una abertura para pasacables (está tapada con un tapón) que es un punto de entrada para los cables procedentes de una resistencia de frenado externa. -
Página 61: Instalación
Instalación 4.2 Instalación del sistema Al instalar la PSU de 24 V se deben tener en cuenta las siguientes restricciones: ● Si no se utiliza una resistencia de frenado externa, la abertura del pasacables debe hermetizarse con un tapón para garantizar que se mantiene la clasificación IP del sistema. - Página 62 Instalación 4.2 Instalación del sistema Figura 4-7 Montaje de las conexiones de entrada y salida Uso de la fuente de alimentación externa con la variante AS-i de G110M La alimentación de 24 V para la variante AS-i del G110M se suministra típicamente por los cables AS-i amarillos y negros que forman la red AS-i.
-
Página 63: Instalación Eléctrica
Figura 4-8 Cables AS-i (con conector M12) Instalación eléctrica 4.3.1 Datos eléctricos de SINAMICS G110M Especificaciones del Power Module - 3AC 380 V (-10%) ... 480 V (+10%) Tabla 4- 2 Intensidades de entrada y salida nominales, y fusibles Producto Tamaño... -
Página 64: Corriente En Reposo
* La PSU de 24 V es un producto opcional específicamente diseñado para ser utilizado con el varia- dor SINAMICS G110M. La PSU de 24 V se monta en la caja de bornes tal como se muestra en Instalación de la fuente de alimentación de 24 V (Página 57). La alimentación externa de 24 V es responsabilidad del usuario y se conecta al variador a través de las conexiones de 24 V tal y... - Página 65 4.3 Instalación eléctrica PRECAUCIÓN Resistencia a temperatura del sistema El sistema SINAMICS G110M consta de un motor y de un variador diseñados para funcionar juntos. El sistema genera una cantidad significativa de calor, que puede afectar al rendimiento de su aplicación.
-
Página 66: Directrices De Montaje Para Cem
Instalación 4.3 Instalación eléctrica 4.3.2 Directrices de montaje para CEM 4.3.2.1 Conexiones y supresión de interferencias Todas las conexiones deben estar hechas de forma que sean permanentes. Las conexiones roscadas en componentes de metal pintado o anodizado deben realizarse bien con arandelas de contacto especiales que penetran en la superficie aislante y crean un contacto entre partes metálicas conductoras, o bien retirando la superficie aislante en los puntos de contacto. -
Página 67: Pantallas De Cable
Instalación 4.3 Instalación eléctrica Pantallas de cable ● Utilizar cables apantallados con pantallas flexibles y de malla fina. Las pantallas de lámina no son adecuadas porque son mucho menos eficaces. ● Conectar las pantallas a las carcasas puestas en tierra por ambos lados con excelente conductividad eléctrica y un área de contacto amplia. - Página 68 Medidas de puesta a tierra y de conexión equipotencial de alta frecuencia En la figura siguiente se ilustran todas las medidas de puesta a tierra y de conexión equipotencial de alta frecuencia con el ejemplo del SINAMICS G110M. Figura 4-9 Medidas de puesta a tierra y de conexión equipotencial de alta frecuencia en el sistema...
-
Página 69: Medidas Adicionales
Instalación 4.3 Instalación eléctrica Medidas adicionales Las trenzas de cobre de hilo fino deben tenderse en paralelo a las pantallas de cable en los siguientes casos: ● Instalaciones antiguas con cables no apantallados existentes ● Cables con escasas propiedades de alta frecuencia ●... -
Página 70: Dimensionado De Los Conductores De Protección
Instalación 4.3 Instalación eléctrica Dimensionado de los conductores de protección Cumpla las normas locales para conductores de protección con corriente de fuga elevada en el lugar de operación. ① Conductor de protección del cable de conexión de red ② Conductor de protección del cable de conexión de red del convertidor ③... -
Página 71: Conexiones Y Cables
Instalación 4.3 Instalación eléctrica 4.3.4 Conexiones y cables Los siguientes diagramas de bloques y las siguientes tablas muestran los detalles y las limitaciones de las conexiones del convertidor. Aislamiento Los siguientes componentes se suministran con cables preparados, de forma que no es necesario aislarlos: ●... -
Página 72: Profibus-Dp
Instalación 4.3 Instalación eléctrica Protocolo de comunicación Velocidad de transferencia o Longitud total máxima de cables tipo de cable 19.2 kbit/s 1200 m (3,940 ft) 38.4 kbit/s 1200 m (3,940 ft) 187.5 kbit/s 1000 m (3,280 ft) PROFIBUS-DP 9.6 - 187.5 kbit/s 1000 m (3.280 ft) 500 kbit/s 400 m (1,312 ft) -
Página 73: Diagrama General De Bloques
Instalación 4.3 Instalación eléctrica Diagrama general de bloques Figura 4-11 Diagrama general de bloques SINAMICS CU240M y PM240M Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 74: Especificaciones De Cables, Conectores Y Herramientas
Especificaciones de cables, conectores y herramientas Las especificaciones concretas para los cables, los conectores y las herramientas que deben usarse para confeccionar los cables necesarios para SINAMICS G110M se indican en los siguientes documentos, a los que se puede acceder mediante los enlaces relevantes: SINAMICS y motores para accionamientos monoeje, catálogo D31... - Página 75 Instalación 4.3 Instalación eléctrica Información adicional de producto de Siemens (http://support.automation.siemens.com/WW/view/es/65355810) Las conexiones que se detallan en la presente sección hacen referencia a las conexiones físicas existentes en el variador. Nota Compatibilidad con NFPA Estos dispositivos están diseñados solo para instalarse en máquinas industriales de conformidad con la norma "Electrical Standard for Industrial Machinery"...
- Página 76 Instalación 4.3 Instalación eléctrica Diagrama de bornes USS Conector M12, 5 polos, ma- Conector M12, 5 polos, hem- Diagrama de bornes PROFIBUS Conector M12, 5 polos, ma- Conector M12, 5 polos, hem- Diagrama de bornes PROFINET Conector M12, 4 polos, hem- Conector M12, 4 polos, hem- Diagrama de bornes AS-i Conector M12, 5 polos, hem-...
- Página 77 Instalación 4.3 Instalación eléctrica Alimentación de 24 V: USS, PROFIBUS, PROFINET Para que el dispositivo funcione, se requiere alimentación de 24 V no conmutada (1L+). ● Use una alimentación con PELV (Protective Extra Low Voltage). ● Para aplicaciones en EE. UU. y Canadá: Utilice una alimentación NEC de Clase 2. ●...
- Página 78 Instalación 4.3 Instalación eléctrica Diagrama de bornes de E/S, todas las variantes La corriente máxima combinada para todas las entradas digitales es 200 mA, y la corriente máxima combinada para todas las salidas digitales, 500 mA. Conector M12, 5 polos, hem- Especificación: PNP, compatible con SIMATIC, nivel bajo <...
-
Página 79: Conexión En Estrella O Triángulo Del Motor Al Convertidor
Instalación 4.3 Instalación eléctrica Figura 4-13 Conexiones del motor y de potencia de la Control Unit 4.3.5 Conexión en estrella o triángulo del motor al convertidor Los motores asíncronos normalizados con una potencia asignada de aprox. ≤ 3 kW están conectados normalmente en estrella/triángulo (Y/Δ) con 400 V/230 V. -
Página 80: Protección De Cables
Instalación 4.3 Instalación eléctrica Utilización del motor con conexión en triángulo con característica a 87 Hz Con la conexión en triángulo, el motor funciona con una tensión y una frecuen- cia superiores a sus valores asignados. Como consecuencia, la potencia entre- gada del motor aumenta con un valor aproximado correspondiente al factor √3 ≈... -
Página 81: Instalación Con Alimentación Encadenada
SINAMICS y motores para accionamientos monoeje, catálogo D31 (https://intranet.automation.siemens.com/mcms/infocenter/content/es/Pages/order_form.asp x?nodeKey=key_566000&infotype=catalogs&linkit=null) Instalación con alimentación encadenada El sistema SINAMICS G110M se ha diseñado para alimentar varios variadores mediante un cable que va de uno al siguiente. Los límites de intensidad máximos para la alimentación encadenada se indican a continuación: ●... -
Página 82: Conexión Del Freno De Mantenimiento Del Motor
Instalación 4.3 Instalación eléctrica Nota Protección contra fallos del circuito del motor La desconexión electrónica por sobrecorriente cumple los requisitos de IEC 60364-3- 2:2005/AMD1: apartado 411 para la protección contra descarga eléctrica. • Tenga en cuenta las especificaciones de instalación de este manual. •... -
Página 83: Conexión De La Interfaz Profinet
Instalación 4.3 Instalación eléctrica 4.3.7 Conexión de la interfaz PROFINET Cables Industrial Ethernet y longitudes de cable En la tabla siguiente se indican los cables Ethernet recomendados. Tabla 4- 7 Cables PROFINET recomendados Tipo de cable Longitud máx. Referencia entre dispositivos Industrial Ethernet FC TP Standard Cable GP 2 x 2 100 m (328 ft) 6XV1840-2AH10... -
Página 84: Ejemplo De Cableado Para Los Ajustes De Fábrica
Instalación 4.3 Instalación eléctrica 4.3.9 Ejemplo de cableado para los ajustes de fábrica Para asegurarse de que se pueda usar el ajuste de fábrica de las interfaces, debe cablear el accionamiento tal como se muestra en los siguientes ejemplos. Preasignación de fábrica de las interfaces del accionamiento Para obtener una especificación técnica completa de las conexiones individuales, consulte las siguientes figuras: Conexiones y cables (Página 69) -
Página 85: Macros Para Cu240M
Para obtener una explicación completa sobre la alimentación de 24 V conmutada y no conmutada, así como de sus limitaciones, consulte las PSUQ en el siguiente enlace: Alimentación de 24 V conmutada y no conmutada (http://support.automation.siemens.com/WW/view/es/26986267) Macros para CU240M Las macros disponibles para los módulos de control CU240M se muestran en las siguientes figuras. - Página 86 Instalación 4.3 Instalación eléctrica Figura 4-19 Macro 7: conmutación entre bus de campo y JOG a través de DI 3 (DP/PN predeterminado) Figura 4-20 Macro 9: potenciómetro motorizado (PMot) Figura 4-21 Macro 12: mando a 2 hilos con método 1 Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 87 Instalación 4.3 Instalación eléctrica Figura 4-22 Macro 17: mando a 2 hilos con método 2 Figura 4-23 Macro 18: mando a 2 hilos con método 3 Figura 4-24 Macro 19: mando a 3 hilos con método 1 Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 88 Instalación 4.3 Instalación eléctrica Figura 4-25 Macro 20: mando a 3 hilos con método 2 Figura 4-26 Macro 21: bus de campo USS Figura 4-27 Macro 28: cinta transportadora con 2 consignas fijas Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 89 Instalación 4.3 Instalación eléctrica Figura 4-28 Macro 29: cinta transportadora con consigna por potenciómetro y fija (USS predeterminado) Figura 4-29 Macro 30: esclavo único AS-i con consignas fijas (AS-i predeterminado) Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 90 Instalación 4.3 Instalación eléctrica Figura 4-30 Macro 31: esclavo único AS-i con consignas fijas Figura 4-31 Macro 32: esclavo único AS-i con consigna análoga Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 91 Instalación 4.3 Instalación eléctrica Figura 4-32 Macro 33: cinta transportadora descentralizada 4DI con bus de campo Figura 4-33 Macro 34: esclavo doble AS-i con consigna Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 92: Conexión Del Convertidor Al Bus De Campo
Instalación 4.4 Conexión del convertidor al bus de campo Conexión del convertidor al bus de campo 4.4.1 Versión del bus de campo de la Control Unit Interfaces a bus de campo de las Control Units Hay distintas versiones de Control Units para la comunicación con un sistema de control de nivel superior: Bus de campo Perfil... -
Página 93: El Convertidor Como Estación Ethernet
● Shared Device, en Control Units con funciones de seguridad El convertidor como estación Ethernet Figura 4-35 El convertidor como estación Ethernet Consulte también http://support.automation.siemens.com/WW/view/es/19292127 (http://support.automation.siemens.com/WW/view/es/19292127) PROFINET (http://www.automation.siemens.com/mcms/automation/en/industrial- communications/profinet/Pages/Default.aspx) Para más información sobre el funcionamiento como estación Ethernet, consulte el manual de funciones "Buses de campo". -
Página 94: Conexión Del Convertidor A Profinet
Instalación 4.4 Conexión del convertidor al bus de campo Manuales para el variador (Página 399) 4.4.2.1 Conexión del convertidor a PROFINET Procedimiento 1. Conecte el convertidor con el controlador a través del conector hembra PROFINET X03. Conexiones y cables (Página 69) La longitud de cable máxima permitida hasta la anterior o la siguiente estación es de 100 2. -
Página 95: Ejemplos De Aplicación
Control de la velocidad de SINAMICS G110M/G120/G120C/G120D con S7-300/400F vía PROFINET o PROFIBUS, con Safety Integrated (mediante borne) y HMI (https://support.industry.siemens.com/cs/ww/es/view/60441457) Control de la velocidad de SINAMICS G110M/G120 (Startdrive) con S7-1500 (TO) vía PROFINET o PROFIBUS, con Safety Integrated (mediante borne) y HMI (https://support.industry.siemens.com/cs/ww/es/view/78788716) 4.4.2.3... -
Página 96: Profibus
únicamente el conector X03 y conecte la resistencia de cierre del bus. Disposición general del sistema SINAMICS G110M (Página 32) La longitud de cable máxima permitida hasta la estación anterior y la siguiente es de 100 m a una velocidad de transferencia de 1 Mbit/s. -
Página 97: Instalación De Gsd
Control de la velocidad de SINAMICS G110M/G120/G120C/G120D con S7-300/400F vía PROFINET o PROFIBUS, con Safety Integrated (mediante borne) y HMI (https://support.industry.siemens.com/cs/ww/es/view/60441457) Control de la velocidad de SINAMICS G110M/G120 (Startdrive) con S7-1500 (TO) vía PROFINET o PROFIBUS, con Safety Integrated (mediante borne) y HMI (https://support.industry.siemens.com/cs/ww/es/view/78788716) 4.4.3.3... - Página 98 Cuando trabaje con Startdrive, guarde los ajustes de forma no volátil. Disposición general del sistema SINAMICS G110M (Página 32) Ajuste de la dirección de bus Procedimiento 1.
-
Página 99: Comunicaciones A Través De As-I
Instalación 4.4 Conexión del convertidor al bus de campo 4.4.4 Comunicaciones a través de AS-i Información general El variador opera en función de la especificación AS-i V3.0 ampliada. La señalización se realiza en forma de pulsos de corriente con codificación Manchester superpuestos en la alimentación de 28 V. -
Página 100: Ajuste De La Dirección
Instalación 4.4 Conexión del convertidor al bus de campo Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856) Tabla 4- 8 Asignación de pines X03 AS-i (M12) Función Descripción AS-i + Signo más de AS-i Potencial de referencia para borne 4 AS-i -... -
Página 101: Direccionamiento Mediante Dispositivo De Direccionamiento (P. Ej., 3Rk1904-2Ab02)
Encontrará más información en el manual del sistema de AS-Interface, apartado "Ajuste de la dirección AS-i". Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856) Direccionamiento mediante dispositivo de direccionamiento (p. ej., 3RK1904-2AB02) El direccionamiento mediante el dispositivo de direccionamiento se realiza offline. -
Página 102: Uso De La Programadora As-I
Instalación 4.4 Conexión del convertidor al bus de campo 4.4.4.2 Uso de la programadora AS-i Ajuste de la dirección del esclavo con la programadora de direcciones AS-i El variador contiene dos esclavos AS-i lógicos. A cada esclavo se le puede asignar una dirección dentro del rango 1A... - Página 103 Instalación 4.4 Conexión del convertidor al bus de campo Ajuste de la dirección AS-i del esclavo 2 Pulse el botón ; la pantalla presenta el texto SEArch seguido por uSE 0. En la parte izquierda de la pantalla se muestra un pequeño 0, y el número el primer esclavo que ya ha sido asignado al esclavo 1 se visualiza en la parte inferior de la pantalla.
- Página 104 Instalación 4.4 Conexión del convertidor al bus de campo Para cambiar la dirección existente de un esclavo, se debe seguir el siguiente procedimiento: Conecte la programadora AS-i en el conector de direccionamiento del variador. Gire el dial de la programadora hasta la posición ADDR. La pantalla indicará...
-
Página 105: Puesta En Marcha
Puesta en marcha Directrices de puesta en marcha Se recomienda el siguiente procedimiento: 1. Defina los requisitos de la aplicación colocada en el accionamiento. → (Página 105). 2. Restablezca el variador a los ajustes de fábrica si es preciso. → (Página 114). 3. -
Página 106: Herramientas De Puesta En Marcha
Puesta en marcha 5.2 Herramientas de puesta en marcha Herramientas de puesta en marcha Figura 5-1 Herramientas de puesta en marcha: PC o kit portátil del IOP Tabla 5- 1 Componentes y herramientas para puesta en marcha y copia de seguridad de datos Componente o herramienta Referencia Panel de mando... -
Página 107: Preparar La Puesta En Marcha
4 polos de Siemens. Si no utiliza un motor estándar de 4 polos de Siemens con un motor con la misma potencia nominal que el variador, por ejemplo, un variador de 1,5 kW y un motor de 1,5 kW, su aplicación no funcionará... -
Página 108: Obtención De Los Datos Del Motor
5.3.1 Obtención de los datos del motor En general, el sistema SINAMICS G110M se suministra completamente montado, esto es, variador, Power Module y motor; sin embargo, en función de los requisitos de la aplicación del usuario, puede ser necesario introducir datos de motor específicos. Todos los datos de motor necesarios se muestran en la placa de características, tal como muestra el siguiente... - Página 109 5.3 Preparar la puesta en marcha Código de matriz Norma aplicada N.º de serie FDU = Siemens AG, Bahnhofstr. 40, 72072 Tübingen, Alemania Marcado CE u otro marcado, si se precisa Referencia Modelo - Tipo - Tamaño Posición de montaje Grado de protección según IEC 60034-5 o IEC 60529...
-
Página 110: Ajustes De Fábrica Del Convertidor
[rpm] 44 Designación del motor, parte activa ● Si utiliza la herramienta de puesta en marcha STARTER y un motor SIEMENS, solo debe indicar la referencia del motor; en los demás casos, debe anotar los datos que figuran en la placa de características del motor. -
Página 111: Encendido Y Apagado Del Motor
Puesta en marcha 5.3 Preparar la puesta en marcha Encendido y apagado del motor Figura 5-3 Encendido y apagado del motor, e inversión de sentido en el ajuste de fábrica El convertidor se suministra con la siguiente configuración de fábrica: ●... -
Página 112: Control Por U/F O Regulación De Velocidad
Puesta en marcha 5.3 Preparar la puesta en marcha 5.3.3 Control por U/f o regulación de velocidad Para los motores de inducción, existen dos técnicas distintas de control o regulación: ● Control por U/f (cálculo de la tensión del motor usando una característica) ●... -
Página 113: Velocidades Mínima Y Máxima
Datos de motor con p300 y p301 Datos de motor preasignados con p0300 y p0301 El software SINAMICS G110M está configurado para introducir los datos del motor en base a su referencia. Hay dos parámetros asociados a esta función, que son p0300 (tipo de motor) y p0301 (referencia de motor). -
Página 114: Puesta En Marcha Utilizando Referencias De Motor
Puesta en marcha 5.4 Puesta en marcha rápida Puesta en marcha utilizando referencias de motor Para la puesta en marcha utilizando referencias de motor, por ejemplo, en STARTER con "Lista de experto", se deben realizar los siguientes pasos: 1. Ajuste p0010 = 1. 2. - Página 115 Puesta en marcha 5.4 Puesta en marcha rápida PRECAUCIÓN El parámetro p0301 debe ajustarse a 0. Al realizar una puesta en marcha introduciendo manualmente los datos de motor, es importante que p0301 se ajuste a 0. Si p0301 no se ajusta a 0, al finalizar el proceso de puesta en marcha no se realizará ninguna identificación del motor, ni siquiera si la función de identificación del motor está...
-
Página 116: Puesta En Marcha Rápida Con Interruptores Dip
Communications and Power Interface y el Control Module incluido engloban todos los componentes que forman una configuración de Control Unit estándar; pero, a la hora de montar e instalar el sistema SINAMICS G110M, el Control Module necesita una designación unívoca para identificarlo fácilmente en los procedimientos de instalación. - Página 117 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-5 Ubicación de los interruptores DIP Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 118 Puesta en marcha 5.4 Puesta en marcha rápida Acceso a los interruptores DIP PELIGRO Presencia de tensiones y corrientes peligrosas en el variador activo Cuando el variador se conecta a la red, aunque no esté activo, en el sistema hay presentes niveles peligrosos de tensión y corriente.
- Página 119 Puesta en marcha 5.4 Puesta en marcha rápida Descripción de las funciones de los interruptores DIP Si los interruptores DIP se encuentran en posición DES, el valor de la función queda definido por el valor predeterminado del parámetro. Si el interruptor DIP se encuentra activado para una función específica, los parámetros de esa función no se pueden modificar editando manualmente el valor del parámetro, es decir, es de solo lectura.
- Página 120 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-8 Interruptores DIP 1 de puesta en marcha Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 121 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-9 Interruptores DIP 2 de puesta en marcha Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 122: Puesta En Marcha De Un Accionamiento Descentralizado Con El Iop-2
Puesta en marcha 5.4 Puesta en marcha rápida 5.4.3 Puesta en marcha de un accionamiento descentralizado con el IOP-2 Descripción general Para la puesta en marcha básica de un accionamiento descentralizado, debe utilizarse el kit de dispositivo portátil IOP-2 Handheld Kit (HHK). Encontrará... - Página 123 Puesta en marcha 5.4 Puesta en marcha rápida Seleccionar "Introducir datos Seleccionar el tipo de motor Seleccionar la característica del motor" Seleccionar "Siguiente" Introducir la frecuencia del Introducir la tensión del mo- motor Introducir la corriente del Introducir la potencia asigna- Introducir la velocidad del motor motor...
- Página 124 Puesta en marcha 5.4 Puesta en marcha rápida Introducir la velocidad del Introducir límites de corriente Seleccionar opción en "ID de motor datos del motor" Introducir el tipo de encóder Introducir el número de im- Seleccionar la fuente de ma- pulsos de encóder por vuelta Introducir la velocidad máxi- Introducir el tiempo de acele-...
-
Página 125: P0015 Macros
Puesta en marcha 5.4 Puesta en marcha rápida Resumen de los ajustes, Guardar los ajustes Ajustes guardados seleccionar "Siguiente" Se muestra la pantalla de Con la primera orden de estado conexión se realiza la identi- ficación del motor 5.4.4 p0015 Macros Macros para CU240M Las macros disponibles para los módulos de control CU240M se muestran en las siguientes figuras. - Página 126 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-10 Macro 7: conmutación entre bus de campo y JOG a través de DI 3 (DP/PN predeterminado) Figura 5-11 Macro 9: potenciómetro motorizado (PMot) Figura 5-12 Macro 12: mando a 2 hilos con método 1 Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 127 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-13 Macro 17: mando a 2 hilos con método 2 Figura 5-14 Macro 18: mando a 2 hilos con método 3 Figura 5-15 Macro 19: mando a 3 hilos con método 1 Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 128 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-16 Macro 20: mando a 3 hilos con método 2 Figura 5-17 Macro 21: bus de campo USS Figura 5-18 Macro 28: cinta transportadora con 2 consignas fijas Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 129 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-19 Macro 29: cinta transportadora con consigna por potenciómetro y fija (USS predeterminado) Figura 5-20 Macro 30: esclavo único AS-i con consignas fijas (AS-i predeterminado) Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 130 Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-21 Macro 31: esclavo único AS-i con consignas fijas Figura 5-22 Macro 32: esclavo único AS-i con consigna análoga Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 131: Puesta En Marcha Rápida Con Un Pc
Puesta en marcha 5.4 Puesta en marcha rápida Figura 5-23 Macro 33: cinta transportadora descentralizada 4DI con bus de campo Figura 5-24 Macro 34: esclavo doble AS-i con consigna 5.4.5 Puesta en marcha rápida con un PC Las pantallas que aparecen en este manual constituyen ejemplos de carácter general. En función del tipo de convertidor, las pantallas ofrecen más o menos posibilidades de ajuste. -
Página 132: Puesta En Servicio Con Starter
Puesta en marcha 5.4 Puesta en marcha rápida Puesta en servicio con STARTER En función de la control unit, se dispone de estas interfaces: Tabla 5- 3 Posibilidades de conexión para STARTER Tipo PROFIBUS PROFINET PC conectado a CU con: Cable USB Interfaz PROFIBUS Interfaz PROFINET... -
Página 133: Incorporación De Convertidor Conectado A Través De Usb En El Proyecto
Puesta en marcha 5.4 Puesta en marcha rápida 5.4.5.2 Incorporación de convertidor conectado a través de USB en el proyecto Incorporación del convertidor en el proyecto Procedimiento 1. Conecte la tensión de alimentación del convertidor. 2. Enchufe un cable USB primero en su PC y después en el convertidor. 3. -
Página 134: Paso A Online E Inicio Del Asistente De Puesta En Marcha
Puesta en marcha 5.4 Puesta en marcha rápida 5.4.5.3 Paso a online e inicio del asistente de puesta en marcha Procedimiento 1. Marque el proyecto y pase a online: 2. En la siguiente pantalla, seleccione el convertidor con el que desee pasar a online. 3. - Página 135 Puesta en marcha 5.4 Puesta en marcha rápida Defina si el convertidor controla un freno de mantenimiento del motor. Ajuste los parámetros más importantes de acuerdo con su aplicación. Aplicación: ● [0]: En todas las aplicaciones que no se incluyan en [3] ●...
-
Página 136: Selección Del Modo De Regulación
Puesta en marcha 5.4 Puesta en marcha rápida 5.4.5.4 Selección del modo de regulación Aplicaciones adecuadas y propiedades de regulación típicas Regulación U/f o FCC (regulación de Regulación vectorial sin encóder Regulación vectorial con encó- flujo) sin encóder Ejemplos de Transportadores horizontales Transportadores horizontales Transportadores verticales... -
Página 137: Identificar Los Datos Del Motor
Puesta en marcha 5.4 Puesta en marcha rápida Regulación U/f o FCC (regulación de Regulación vectorial sin encóder Regulación vectorial con encó- flujo) sin encóder – Para tiempos de encendido Normalmente alcanza una Amplía la precisión de par • • 0 →... - Página 138 Puesta en marcha 5.4 Puesta en marcha rápida ADVERTENCIA Movimiento imprevisto de la máquina al estar activa la identificación de datos del motor La medición en parada puede hacer girar el motor varias vueltas. La medición en giro acelera el motor hasta la velocidad asignada. Antes de comenzar la identificación de los datos del motor, proteja las partes peligrosas de la instalación: •...
-
Página 139: Autooptimización De La Regulación De Velocidad
Puesta en marcha 5.5 Restablecimiento de los ajustes de fábrica 6. Devuelva el mando una vez identificados los datos del motor. 7. Guarde los ajustes en el convertidor (RAM → EEPROM): Ha finalizado la identificación de los datos del motor. ❒... -
Página 140: Restablecimiento De Los Ajustes De Fábrica De Las Funciones De Seguridad
Puesta en marcha 5.5 Restablecimiento de los ajustes de fábrica 5.5.1 Restablecimiento de los ajustes de fábrica de las funciones de seguridad Procedimiento 1. Pase a online. 2. Seleccione "Puesta en marcha". 3. Seleccione "Copia de seguridad/restauración". 4. Seleccione "Los parámetros Safety se resetean". 5. - Página 141 Puesta en marcha 5.5 Restablecimiento de los ajustes de fábrica 6. Espere a que el convertidor ajuste p0971 = 0. 7. Desconecte la tensión de alimentación del convertidor. 8. Espere a que se apaguen todos los LED del convertidor. 9. Vuelva a conectar la tensión de alimentación del convertidor. Ha restablecido los ajustes de fábrica de las funciones de seguridad del convertidor.
-
Página 142: Restablecer Los Ajustes De Fábrica (Sin Funciones De Seguridad)
Puesta en marcha 5.5 Restablecimiento de los ajustes de fábrica 5.5.2 Restablecer los ajustes de fábrica (sin funciones de seguridad) Restablecimiento de los ajustes de fábrica con Startdrive Procedimiento 1. Pase a online. 2. Seleccione "Puesta en marcha". 3. Seleccione "Copia de seguridad/restauración". 4. -
Página 143: Puesta En Marcha Avanzada
Puesta en marcha avanzada Vista general de las funciones del variador Figura 6-1 Vista general de las funciones del variador Control de accionamiento El convertidor recibe sus comandos desde el control de nivel superior a través de la regleta de bornes o de la interfaz de bus de campo de la Control Unit. El control de accionamiento define cómo responde el convertidor a los comandos. -
Página 144: Funciones De Seguridad
Puesta en marcha avanzada 6.1 Vista general de las funciones del variador Freno de mantenimiento del motor (Página 200) Los bloques de función libres permiten un procesamiento de señales configurable dentro del convertidor. Bloques de función libres (Página 204) Puede seleccionar las unidades físicas en las que el convertidor representa sus valores asociados. - Página 145 Puesta en marcha avanzada 6.1 Vista general de las funciones del variador Protección contra sobreintensidad (Página 282) Protección del convertidor con vigilancia de temperatura (Página 283) Vigilancia de la temperatura del motor mediante un sensor de temperatura (Página 286) Protección del motor mediante el cálculo de la temperatura (Página 290) Protección del motor y del convertidor mediante limitación de tensión (Página 292) La vigilancia de la carga accionada evita modos de funcionamiento no permitidos, p.
-
Página 146: Secuenciador Al Conectar Y Desconectar El Motor
Puesta en marcha avanzada 6.2 Secuenciador al conectar y desconectar el motor Secuenciador al conectar y desconectar el motor Vista general El secuenciador determina las reglas que rigen para conectar y desconectar el motor. Figura 6-2 Representación simplificada del secuenciador Después de conectar la tensión de alimentación, el convertidor pasa normalmente al estado "Listo para conexión". -
Página 147: Descripción Del Funcionamiento
Puesta en marcha avanzada 6.2 Secuenciador al conectar y desconectar el motor Descripción del funcionamiento Figura 6-3 Secuenciador del convertidor al conectar y desconectar el motor Los estados del convertidor S1 … S5c están definidos en el perfil PROFIdrive. El secuenciador define el cambio de un estado a otro. -
Página 148: Adaptación De Ajustes Predeterminados De Las Entradas Y Salidas
Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas Tabla 6- 2 Órdenes para conectar y desconectar el motor El convertidor conecta el motor. Jog 1 Jog 2 Habilitar servicio DES1, DES3 El convertidor frena el motor. Cuando el motor está parado, el convertidor desconecta el motor. El motor está... - Página 149 Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas Figura 6-4 Interconexión interna de entradas y salidas Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 150: Entradas Digitales
Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas 6.3.1 Entradas digitales Cambio de la función de la entrada digital Interconecte el parámetro de estado de la entrada digi- tal con la entrada de binector que prefiera. Interconexión de señales en el variador (Pági- na 386) Las entradas de binector están marcadas con "BI"... -
Página 151: Entradas Analógicas Y Digitales
Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas Cambio de la función de una entrada digital, ejemplo Para conectar el motor con la entrada digital DI 2, es necesario conectar el parámetro de estado de DI 2 con p0840: Ajuste p0840 = 722.2. -
Página 152: Salidas Digitales
Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas 6.3.2 Salidas digitales Cambio de la función de la salida digital Interconecte la salida digital con la salida de binec- tor que prefiera. Interconexión de señales en el variador (Pá- gina 386) Las salidas de binector están marcadas con "BO"... -
Página 153: Entradas Analógicas
Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas 6.3.3 Entradas analógicas Cambio de la función de la entrada analógica 1. Defina el tipo de entrada analógica mediante el parámetro p0756 y los interruptores DIP de la Control Unit para entrada tipo corriente o tensión. - Página 154 Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas Figura 6-5 Interruptor DIP analógico Como ya se ha mencionado anteriormente, el parámetro p0756 se puede modificar para cambiar el tipo de entrada analógica. Los ajustes predeterminados del parámetro p0756 y sus ajustes predeterminados se indican en la tabla siguiente.
-
Página 155: Ajustes Avanzados
Puesta en marcha avanzada 6.3 Adaptación de ajustes predeterminados de las entradas y salidas Tabla 6- 5 Parámetros para la característica de escala y la vigilancia de rotura de hilo Parámetro Descripción p0757 Coordenada x del 1.er punto de característica [V] p0758 Coordenada y del 1.er punto de característica [% de p200x] p200x son los parámetros de las magnitudes de referencia, p. -
Página 156: Control De Giro A La Derecha Y A La Izquierda A Través De Entradas Digitales
Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales Especificación de la zona muerta Las pequeñas señales de unos pocos milivoltios suelen ser erróneas por efecto de las interferencias en el cable. Para poder introducir una consigna de exactamente 0 V mediante una entrada analógica, debe especificar una zona muerta. - Página 157 Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales Resumen Control por dos hilos, método 1 CON/DES1: Conectar o desconectar el motor Invertir sentido: Invertir el sentido de giro del motor Control por dos hilos, método 2 y control por dos hilos, método 3 CON/DES1 Giro horario:...
-
Página 158: Control Por Dos Hilos, Método 1
Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales 6.4.1 Control por dos hilos, método 1 Figura 6-8 Control por dos hilos, método 1 La orden "CON/DES1" conecta y desconecta el motor. La orden "Inversión de sentido" invierte el sentido de giro del motor. -
Página 159: Control Por Dos Hilos, Método 2
Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales 6.4.2 Control por dos hilos, método 2 Figura 6-9 Control por dos hilos, método 2 Las órdenes "CON/DES1 Giro horario" y "CON/DES1 Giro antihorario" conectan el motor y seleccionan al mismo tiempo un sentido de giro. -
Página 160: Control Por Dos Hilos, Método 3
Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales 6.4.3 Control por dos hilos, método 3 Figura 6-10 Control por dos hilos, método 3 Las órdenes "CON/DES1 Giro horario" y "CON/DES1 Giro antihorario" conectan el motor y seleccionan al mismo tiempo un sentido de giro. -
Página 161: Control Por Tres Hilos, Método 1
Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales 6.4.4 Control por tres hilos, método 1 Figura 6-11 Control por tres hilos, método 1 Para conectar el motor, se requiere la orden "Habilitación". Las órdenes "CON Giro horario" y "CON Giro antihorario"... -
Página 162: Control Por Tres Hilos, Método 2
Puesta en marcha avanzada 6.4 Control de giro a la derecha y a la izquierda a través de entradas digitales 6.4.5 Control por tres hilos, método 2 Figura 6-12 Control por tres hilos, método 2 Para conectar el motor, se requiere la orden "Habilitación". La orden "CON" conecta el motor. -
Página 163: Regulación De Accionamiento Vía Profibus O Profinet
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.1 Datos recibidos y datos enviados Intercambio de datos cíclico El convertidor recibe datos desde el controlador superior de manera cíclica y devuelve datos al controlador de manera cíclica. -
Página 164: Telegramas
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.2 Telegramas Telegramas disponibles A continuación se describen los datos útiles de los telegramas disponibles. Consigna de velocidad de 16 bits Consigna de velocidad de 16 bits para VIK-NAMUR Consigna de velocidad de 16 bits con limitación de par Consigna de velocidad de 16 bits para PCS 7 Consigna de velocidad de 16 bits con lectura y escritura de parámetros... -
Página 165: Interconexión De Datos De Proceso
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Consigna de velocidad de 16 bits para PCS 7 con lectura y escritura de parámetros Longitud e interconexión libre Tabla 6- 23 Significado de las abreviaturas Abreviatura Explicación Abreviatura Explicación Dato de proceso... - Página 166 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET el convertidor interconecta automáticamente los parámetros p2051 y p2061 con las señales correspondientes. Figura 6-16 Interconexión de los datos recibidos El convertidor almacena los datos recibidos en el formato "palabra" (r2050), en el formato "palabra doble"...
-
Página 167: Palabra De Mando Y De Estado 1
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.3 Palabra de mando y de estado 1 Palabra de mando 1 (STW1) Significado Explicación Intercone- xión de Telegrama 20 Resto de tele- señales en gramas el converti- 0 = DES1 El motor frena con el tiempo de deceleración p0840[0] =... - Página 168 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Significado Explicación Intercone- xión de Telegrama 20 Resto de tele- señales en gramas el converti- No utilizado 1 = Subir PMot Aumentar la consigna almacenada en el po- p1035[0] = tenciómetro motorizado.
-
Página 169: Palabra De Mando Y De Estado 3
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Significado Observaciones Intercone- xión de Telegrama 20 Resto de tele- señales en gramas el converti- 1 = límite de 1 = límite de par Se ha alcanzado o superado el valor de p2080[11] = intensidad o de alcanzado... - Página 170 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Bit Significado Explicación Interconexión de se- ñales en el convertidor Telegrama 350 12 1 = Regulación de par activa Conmutación del tipo de regu- p1501[0] = r2093.12 lación con regulación vectorial. 0 = Regulación de velocidad activa 13 1 = Ningún fallo externo p2106[0] = r2093.13...
-
Página 171: Palabra De Aviso Namur
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.5 Palabra de aviso NAMUR Palabra de fallo según definición VIK-NAMUR (MELD_NAMUR) Tabla 6- 24 Palabra de fallo según definición VIK-NAMUR e interconexión con parámetros en el convertidor Bit Significado N.º... -
Página 172: Estructura Del Canal De Parámetros
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.6 Canal de parámetros Estructura del canal de parámetros El canal de parámetros comprende cuatro palabras. La 1.ª y la 2.ª palabras transfieren el número de parámetro, el índice y el tipo de petición (lectura o escritura). La 3.ª y la 4.ª palabras incluyen los contenidos de los parámetros. - Página 173 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Tabla 6- 26 Identificadores de respuesta convertidor → controlador Descripción Sin respuesta Transfiere valor de parámetro (palabra) Transfiere valor de parámetro (palabra doble) Transfiere elemento apto para escritura Transfiere valor de parámetro (campo, palabra) Transfiere valor de parámetro (campo, palabra doble) Transfiere número de elementos de campo...
- Página 174 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET N.° Descripción 6A hex Solicitud no incluida/tarea no soportada (los identificadores de solicitud válidos se encuen- tran en la tabla "Identificadores de solicitud controlador → convertidor") 6B hex Sin acceso de modificación con regulador habilitado.
- Página 175 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET PWE 1 PWE 2 Valor de 16 bits Valor de 32 bits Conector Bit 15 … 0 Bit 15 … 10 Bit 9 … 0 Número del conector 3F hex Índice o número de campo de bits del...
-
Página 176: Ejemplos De Aplicación Del Canal De Parámetros
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.7 Ejemplos de aplicación del canal de parámetros Solicitud de lectura: leer número de serie del Power Module (p7841[2]) Para obtener el valor del parámetro indexado p7841, debe rellenarse el telegrama del canal de parámetros con los siguientes datos: ●... - Página 177 Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET Petición de escritura: asignar a la entrada digital 2 la función CON/DES1 (p0840[1] = 722.2) Para interconectar la entrada digital 2 con CON/DES1, debe asignar al parámetro p0840[1] (fuente CON/DES1) el valor 722.2 (DI 2).
-
Página 178: Ampliación De Telegrama
Puesta en marcha avanzada 6.5 Regulación de accionamiento vía PROFIBUS o PROFINET 6.5.8 Ampliación de telegrama Vista general Tras elegirse un telegrama, el convertidor interconecta las correspondientes señales con la interfaz del bus de campo. Estas interconexiones están normalmente bloqueadas contra modificaciones. -
Página 179: Comunicación Directa
Manuales para el variador (Página 399) Ejemplo de aplicación "Leer y escribir parámetros" Para más información, visite la web: Ejemplos de aplicación (https://support.industry.siemens.com/cs/ww/en/view/29157692) Control vía AS-i 6.6.1 Modo de esclavo simple En el modo de esclavo simple, hay cuatro bits disponibles para la comunicación entre el maestro AS-i y el variador. -
Página 180: Ajuste Predeterminado 32: Modo De Esclavo Simple Modificado
• AS-i.DO2 -> p1023 = 2093.3 Bit 3 de velocidad fija • AS-i.DO3 Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856). Variador -> control Si el control especifica la consigna de velocidad, el variador responde: -> AS-i.DI0 Habilitación operacional para PLC •... -
Página 181: Modo De Esclavo Doble
Si una alarma o fallo está pendiente en el variador, envía un mensaje de aviso o fallo. Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856). Factores de escalado de la velocidad El factor de escalado se especifica a través de AS-i.P0 … AS-i.P3. También se realiza una solicitud de diagnóstico cuando se envía AS-i.P0. - Página 182 Seleccione el esclavo A o el esclavo B, interconectados internamente • AS-i.DO3 Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856). Si el control especifica la consigna de velocidad, el variador responde: Ajuste predeterminado 31, esclavo 2 con perfil 7.A.E: Variador -> control PLC listo para conectar ->...
- Página 183 Si el control envía una solicitud de diagnóstico mediante AS-i.P0, el variador responde con los mensajes de fallo o alarma actualmente pendientes. Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856). Ajuste predeterminado 34, esclavo 1 con perfil 7.A.5: Control -> variador ->...
-
Página 184: Tablas De Dependencias
Puesta en marcha avanzada 6.6 Control vía AS-i Estado DI3 -> AS-i.DI1 • p2080[5] = 722.3 -> AS-i.DI2 • Transferencia serie de datos CTT2, cuatro bytes cíclicamente o acíclicamente mediante PKW Los parámetros se pueden leer y escribir mediante PKW. Puesto que los datos se transfieren bit a bit, el proceso de lectura y escritura es muy lento. -
Página 185: Direccionamiento Modificado: Factores De Escalado
Puesta en marcha avanzada 6.6 Control vía AS-i Direccionamiento modificado: factores de escalado Tabla 6- 30 Escalado de la consigna de velocidad a través de AS-i.P0 … AS-i.P3 AS-i.P3 AS-i.P2 AS-i.P1 AS-i.P0 Factor de escalado Frecuencia [Hz] 0.45 22.5 0.35 17.5 0.25 12.5... -
Página 186: Comunicación Cíclica Y Acíclica Mediante Ctt2
Acceso a valores analógicos a través de DS140 ... DS147. 4 bytes: PWE1, PWE2 Consulte Maestro AS−Interface CP 343−2/CP 343−2 P 4 bytes: PWE1, PWE2 (https://support.industry.siemens.com/cs/ww/es/view/1171856 ), capítulo 4 Comunicación acíclica: estándar 10 hex Solicitud de lectura: maestro -> esclavo 2 bytes: índice, longitud... - Página 187 Puesta en marcha avanzada 6.6 Control vía AS-i Código Explicación/significado Seguido por (hex) 90 hex Fallo en solicitud de lectura: esclavo -> maestro 1 byte: código de error estándar (3 hex) 11 hex Solicitud de escritura: maestro -> esclavo Índice, longitud, datos 51 hex Solicitud de escritura correcta: esclavo ->...
-
Página 188: Comunicación Cíclica
Puesta en marcha avanzada 6.6 Control vía AS-i 6.6.5 Comunicación cíclica Variador -> maestro El variador transfiere cíclicamente los datos de p2051[1] y p2051[2] en cuatro bytes al maestro. Puede procesar estos cuatro bytes en el control como para datos analógicos. Consulte la documentación del maestro AS-i para obtener información detallada sobre el acceso a los datos analógicos. -
Página 189: Comunicación Acíclica: Estándar
47 en formato PKW. La estructura de formato PKW es idéntica a la del canal de parámetro USS. Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856). Para reducir el volumen de transferencia, aparte del mecanismo PKW de intercambio de datos "normal", también existen los comandos de "leer datos" y "escribir datos". -
Página 190: Intercambio De Datos
En el caso de que se produzca un fallo, el variador enviará el siguiente telegrama a modo de respuesta al maestro: Valor para PWE: Tabla de fallos de Manual de interfaz del sistema AS-i (https://support.industry.siemens.com/cs/ww/es/view/1171856). Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 191: Jog
Puesta en marcha avanzada 6.7 JOG La función "JOG" se utiliza típicamente para desplazar de forma temporal un componente de una máquina, p. ej., una cinta transportadora, mediante órdenes in situ. Las órdenes "JOG 1" y "JOG 2" conectan y desconectan el motor. Las órdenes solo son efectivas cuando el convertidor está... -
Página 192: Regulación De Posición Límite
Puesta en marcha avanzada 6.8 Regulación de posición límite Regulación de posición límite Posiciones límite y finales de carrera Una posición límite es una posición en el sentido del movimiento de un componente de una máquina en la que el movimiento se detiene debido a la estructura. Un final de carrera es un sensor que indica que se ha alcanzado la posición límite. -
Página 193: Consulte También
Puesta en marcha avanzada 6.8 Regulación de posición límite ① El motor mueve el componente mecánico en el sentido de la posición límite positiva. ② Se ha alcanzado la posición límite positiva. El motor se detiene con el tiempo de deceleración OFF3. -
Página 194: Ejemplo De Aplicación: Transportador De Rodillos Con Mesa Giratoria
Puesta en marcha avanzada 6.8 Regulación de posición límite Ejemplo de aplicación: transportador de rodillos con mesa giratoria Una mesa giratoria instalada en un transportador de rodillos distribuye ma- terial en la intersección de dos líneas de transporte. La mesa giratoria gira 90° de una posición final a la otra. - Página 195 Puesta en marcha avanzada 6.8 Regulación de posición límite Procedimiento Para adaptar el control de posiciones finales del convertidor a la aplicación, haga lo siguiente: 1. Conecte el convertidor con una herramienta de puesta en marcha, p. ej., un Operator Panel.
-
Página 196: Función De Parada Rápida
Puesta en marcha avanzada 6.9 Función de parada rápida Función de parada rápida Vista general La función de parada rápida permite detectar un paquete sobre la cinta transportadora y, de estar habilitada esta función, para la sección de cinta transportadora afactada. El paquetes obre la sección de cinta transportadora se desplaza hacia un sensor dedicado, tal como se muestra en la figura que aparece a continuación. -
Página 197: Cómo Funciona
Puesta en marcha avanzada 6.9 Función de parada rápida Hay dos sensores en la sección de cinta transportadora, de modo que la función de parada rápida podrá parar la sección de cinta transportadora en cualquiera de las direcciones en el momento en el que se detecte el paquete. - Página 198 Puesta en marcha avanzada 6.9 Función de parada rápida Mediante el parámetro P0886 se puede establecer el tipo de reacción requerida para detener la sección de la cinta transportadora. Básicamente hay dos métodos de activación: con señales activas por flanco y con señales activas por nivel. Cada tipo de método de activación genera una reacción distinta en el comando DES1 y el rearranque del motor.
-
Página 199: Conmutación Del Control De Accionamientos (Juego De Datos De Mando)
Puesta en marcha avanzada 6.10 Conmutación del control de accionamientos (juego de datos de mando) 6.10 Conmutación del control de accionamientos (juego de datos de mando) En algunas aplicaciones debe existir la posibilidad de cambiar el maestro de mando para manejar el convertidor. - Página 200 Puesta en marcha avanzada 6.10 Conmutación del control de accionamientos (juego de datos de mando) La interconexión representada en el ejemplo anterior se obtiene cuando en la puesta en marcha básica las interfaces del convertidor se han configurado con p0015 = 7; ver también el apartado Puesta en marcha rápida (Página 111).
- Página 201 Puesta en marcha avanzada 6.10 Conmutación del control de accionamientos (juego de datos de mando) Parámetro Descripción p0809[0] Copiar juego de datos de mando CDS (ajuste de fábrica: 0) [0] Juego de datos de mando fuente [1] Juego de datos de mando destino [2] 0→1: Iniciar el proceso de copia p0810 Selección juego de datos de mando CDS bit 0...
-
Página 202: Freno De Mantenimiento Del Motor
Puesta en marcha avanzada 6.11 Freno de mantenimiento del motor 6.11 Freno de mantenimiento del motor El freno de mantenimiento del motor mantiene en posición el motor desconectado. Con un ajuste correcto de la función "Freno de mantenimiento del motor", el motor permanece conectado mientras esté... - Página 203 Puesta en marcha avanzada 6.11 Freno de mantenimiento del motor Tras la orden DES1 o DES3 1. Con la orden DES1 o DES3, el convertidor frena el motor hasta la parada. 2. Al frenar, el convertidor compara la consigna de velocidad y la velocidad actual con el "umbral de velocidad para la detección de parada"...
- Página 204 Puesta en marcha avanzada 6.11 Freno de mantenimiento del motor Puesta en marcha del freno de mantenimiento del motor Requisito El freno de mantenimiento del motor está conectado al convertidor. ADVERTENCIA Caída de la carga en caso de ajuste incorrecto de la función "Freno de mantenimiento del motor"...
- Página 205 Puesta en marcha avanzada 6.11 Freno de mantenimiento del motor 6. Compruebe las características de aceleración del accionamiento inmediatamente después de conectar el motor: – Si el freno de mantenimiento del motor se abre demasiado tarde, el convertidor acelera el motor bruscamente contra el freno cerrado. Aumente p1216.
-
Página 206: Bloques De Función Libres
Puesta en marcha avanzada 6.12 Bloques de función libres Tabla 6- 36 Ajustes avanzados Parámetro Descripción p0346 Tiempo de magnetización (ajuste de fábrica 0 s) Tiempo durante el cual se magnetiza un motor asíncrono. El convertidor calcula este parámetro a través de p0340 = 1 ó 3. p0855 Abrir incondicionalmente el freno de mantenimiento (ajuste de fábrica 0) p0858... -
Página 207: Más Información
6.12.2 Más información Descripción de aplicación para los bloques de función libres Para más información, visite la web: Manual de funciones (https://support.industry.siemens.com/cs/ww/es/view/60467055/29243398027) 6.13 Selección de unidades físicas 6.13.1 Norma de motor Opciones de selección y parámetros implicados El convertidor representa los datos del motor de acuerdo con la norma de motor IEC o NEMA en distintos sistemas de unidades: unidades SI o unidades US. -
Página 208: Sistema De Unidades
Puesta en marcha avanzada 6.13 Selección de unidades físicas Paráme- Nombre Norma de motor IEC/NEMA, p0100 = Motor IEC Motor NEMA Motor NEMA 50 Hz, unidades 60 Hz, unidades 60 Hz, unidades r0394 Potencia asignada del motor r1493 Momento de inercia total, esca- lb ft lado Ajuste de fábrica... -
Página 209: Unidad Tecnológica Del Regulador Tecnológico
Puesta en marcha avanzada 6.13 Selección de unidades físicas Magnitudes de referencia Para la mayoría de los parámetros con unidad física existe una magnitud de referencia en el convertidor. Si se ha ajustado la representación [%] relacionada, el convertidor normaliza las magnitudes físicas de acuerdo con la magnitud de referencia correspondiente. -
Página 210: Ajuste Del Sistema De Unidades Y La Unidad Tecnológica
Puesta en marcha avanzada 6.13 Selección de unidades físicas Particularidades Tras una modificación de p0595 o p0596, es necesario optimizar el regulador tecnológico. 6.13.4 Ajuste del sistema de unidades y la unidad tecnológica Ajuste con Startdrive Requisitos Está offline con Startdrive. Procedimiento 1. - Página 211 Puesta en marcha avanzada 6.13 Selección de unidades físicas Procedimiento Para seleccionar la norma de motor y el sistema de unidades con STARTER, proceda del siguiente modo: 1. En el árbol de proyecto, seleccione "Configuración". 2. Seleccione la pestaña "Unidades". 3.
-
Página 212: Función De Seguridad Safe Torque Off (Sto)
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) 6.14 Función de seguridad Safe Torque Off (STO) En las instrucciones de servicio se describe la puesta en marcha de la función de seguridad STO como función básica en caso de control a través de una entrada digital de seguridad. Encontrará... -
Página 213: La Función De Seguridad Sto Está Estandarizada
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) La función de seguridad STO está estandarizada La función STO se define en IEC/EN 61800-5-2: "[…] [El variador] no suministra ninguna energía al motor que pueda generar un par (o una fuerza si el motor es lineal)."... -
Página 214: Requisito Para Utilizar Sto))
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) Ejemplos de aplicación de la función STO La función STO es adecuada para aplicaciones en las que el motor ya está en parada o va a estarlo en un breve periodo de tiempo seguro por fricción. La STO no reduce la deriva de los componentes de la máquina con alta inercia. - Página 215 Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) ¿Debe asignar una contraseña? No es necesario asignar contraseña. La necesidad de contraseña es decisión del fabricante de la máquina. Las probabilidades de fallo por hora (PFH) y la certificación de las funciones de seguridad son válidas aunque no haya contraseña.
-
Página 216: Configuración De Las Funciones De Seguridad
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) 6.14.3.3 Configuración de las funciones de seguridad Procedimiento 1. Seleccione "Selección funcionalidad de seguridad". 2. Seleccione las "Funciones básicas". 3. Seleccione "Tipo de control/Funciones de seguridad". 4. Seleccione "Vía bornes" como tipo de control de las funciones de seguridad. Ha configurado las funciones de seguridad. -
Página 217: Interconexión De La Señal "Sto Activa
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) Parámetro Descripción p9761 Introducción de la contraseña (ajuste de fábrica: 0000 hex) Las contraseñas admisibles se encuentran en el rango 1 … FFFF FFFF. p9762 Contraseña nueva p9763 Confirmación de la contraseña 6.14.3.4 Interconexión de la señal "STO activa"... -
Página 218: Ajuste Del Filtro Para Entradas Digitales De Seguridad
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) 6.14.3.5 Ajuste del filtro para entradas digitales de seguridad Requisitos Está online con Startdrive. Procedimiento 1. Navegue por los ajustes de filtro. 2. Ajuste el tiempo de inhibición de rebote para el filtro de entrada F-DI. 3. - Página 219 Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) Figura 6-31 Vigilancia de simultaneidad con tiempo de discrepancia Filtro para suprimir señales de corta duración En los siguientes casos no se desea una reacción inmediata del convertidor a los cambios de señal de las entradas digitales de seguridad: ●...
-
Página 220: Parámetros Filtro Basic))
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) Figura 6-33 Filtro para suprimir señales de corta duración El filtro aumenta el tiempo de reacción de la función de seguridad con el tiempo de inhibición de rebote. 6.14.3.6 ((Parámetros filtro Basic)) Parámetro... - Página 221 Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) 1. Elija la pantalla para ajustar la dinamización forzada. 2. Ajuste el tiempo de vigilancia con un valor adecuado para su aplicación. 3. Con esta señal, el convertidor comunica que se requiere una dinamización forzada (una parada de prueba).
-
Página 222: Finalización De La Puesta En Marcha Online
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) 6.14.3.8 Finalización de la puesta en marcha online Activar ajustes Requisito Está online con Startdrive. Procedimiento 1. Elija el botón "Finalizar la puesta en marcha de Safety". 2. Conteste afirmativamente a la pregunta de si quiere guardar los ajustes (copiar de RAM a ROM). -
Página 223: Comprobación De La Interconexión De Las Entradas Digitales
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) Parámetro Descripción p0010 = 0 Accto Puesta en marcha Filtro de parámetros 0: Listo p0971 = 1 Guardar parámetros 1: guardar objeto de accionamiento (copiar RAM en ROM) Después de que el convertidor haya guardado los parámetros de forma no volá- til, se ajusta p0971 = 0. -
Página 224: Recepción: Fin De La Puesta En Marcha
Puesta en marcha avanzada 6.14 Función de seguridad Safe Torque Off (STO) 6.14.3.9 Recepción: fin de la puesta en marcha ¿Qué es una recepción? El fabricante es responsable del correcto funcionamiento de su máquina o instalación. Por lo tanto, después de la puesta en marcha el fabricante, directamente o a través de personal técnico, debe comprobar las funciones que entrañen un riesgo elevado de lesiones o daños materiales. -
Página 225: Documentación Del Convertidor
Traces adecuados para analizar el comportamiento de la máquina y generará un certificado de recepción/aceptación en forma de archivo Excel. Para más información, visite la web: Requisitos del sistema y descarga de Startdrive (https://support.industry.siemens.com/cs/ww/en/view/109752254) Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 226: Recepción Reducida Tras Ampliaciones De Funciones
Puesta en marcha avanzada 6.15 Consignas Recepción reducida tras ampliaciones de funciones Solo es necesario realizar la recepción completa después de la primera puesta en marcha. Para posteriores ampliaciones de las funciones de seguridad basta con una recepción reducida. Acción Recepción Prueba de recep- Documentación... - Página 227 Puesta en marcha avanzada 6.15 Consignas Figura 6-35 Fuentes de consigna del convertidor Existen las siguientes posibilidades para la fuente de la consigna principal: ● Interfaz de bus de campo del convertidor ● Entrada analógica del convertidor ● Potenciómetro electromecánico ●...
-
Página 228: Entrada Analógica Como Fuente De Consigna
Puesta en marcha avanzada 6.15 Consignas 6.15.2 Entrada analógica como fuente de consigna Descripción del funcionamiento Figura 6-36 Ejemplo: entrada analógica 0 como fuente de consigna En la puesta en marcha rápida se establece un ajuste predefinido para las interfaces del convertidor. -
Página 229: Consulte También
Puesta en marcha avanzada 6.15 Consignas Parámetro Descripción Ajuste p1075[0…n] CI: Consigna adicional Fuente de señal para la consigna adicional Ajuste de fábrica: 0 p1076[0…n] CI: Consigna adicional Fac- Fuente de señal para el escalado de la consigna adicional tor escala Ajuste de fábrica: 0 Más información Encontrará... -
Página 230: Predeterminar La Consigna A Través Del Bus De Campo
Puesta en marcha avanzada 6.15 Consignas 6.15.3 Predeterminar la consigna a través del bus de campo Descripción del funcionamiento Figura 6-37 Bus de campo como fuente de consigna En la puesta en marcha rápida se establece un ajuste predefinido para las interfaces del convertidor. - Página 231 Puesta en marcha avanzada 6.15 Consignas Parámetro Descripción Ajuste p1076[0…n] CI: Consigna adicional Fac- Fuente de señal para el escalado de la consigna adicional tor escala Ajuste de fábrica: 0 r2050[0…11] CO: PROFIdrive PZD recep- Salida de conector para interconectar los PZD con formato de palabra ción palabra recibidos por el controlador de bus de campo.
-
Página 232: Potenciómetro Electromecánico
Puesta en marcha avanzada 6.15 Consignas 6.15.4 Potenciómetro electromecánico El variador tiene un potenciómetro electromecánico. El potenciómetro está cableado de forma fija con la entrada analógica interna 2. Al utilizar comunicaciones USS o Modbus, el potenciómetro proporciona la consigna principal de forma predeterminada. Figura 6-38 Potenciómetro como fuente de consigna Tabla 6- 39... -
Página 233: Potenciómetro Motorizado Como Fuente De Consigna
Puesta en marcha avanzada 6.15 Consignas 6.15.5 Potenciómetro motorizado como fuente de consigna Descripción del funcionamiento La función "Potenciómetro motorizado" emula un potenciómetro electromecánico. El valor de salida del potenciómetro motorizado se puede ajustar mediante las señales de mando "Subir" y "Bajar". Figura 6-39 Potenciómetro motorizado como fuente de consigna Figura 6-40... - Página 234 Puesta en marcha avanzada 6.15 Consignas Parámetro Tabla 6- 40 Configuración básica del potenciómetro motorizado Parámetro Descripción Ajuste p1035[0…n] BI: Subir consigna poten- Fuente de señal para subir la consigna continuamente ciómetro motorizado El ajuste de fábrica varía en función del convertidor Convertidores con interfaz PROFIBUS o PROFINET: [0] 2090.13 [1] 0...
- Página 235 Puesta en marcha avanzada 6.15 Consignas Tabla 6- 41 Ajuste avanzado del potenciómetro motorizado Parámetro Descripción Ajuste p1030[0…n] Potenciómetro motorizado Configuración del potenciómetro motorizado Configuración Ajuste de fábrica: 00110 Bin Memorización activa =0: Tras conectar el motor, la consigna es = p1040 = 1: Tras desconectar el motor, el convertidor guarda la consigna.
-
Página 236: Consigna Fija De Velocidad Como Fuente De Consigna
Puesta en marcha avanzada 6.15 Consignas 6.15.6 Consigna fija de velocidad como fuente de consigna Descripción del funcionamiento Figura 6-41 Consigna fija de velocidad como fuente de consigna El convertidor distingue dos métodos para la selección de las consignas fijas de velocidad: Selección directa de la consigna fija de velocidad Se ajustan 4 consignas fijas de velocidad diferentes. - Página 237 Puesta en marcha avanzada 6.15 Consignas Figura 6-43 Selección binaria de consignas fijas de velocidad Ejemplo una cinta transportadora se mueve tras el encendido solo con dos velocidades distintas. El motor debe funcionar a las velocidades correspondientes siguientes: ● La señal de la entrada digital 0 conecta el motor y lo acelera a 300 1/min ●...
- Página 238 Puesta en marcha avanzada 6.15 Consignas Parámetro Parámetro Descripción Ajuste p1001[0...n] Consigna fija de velocidad 1 Consigna fija de velocidad 1 [1/min] Ajuste de fábrica: 0 1/min p1002[0...n] Consigna fija de velocidad 2 Consigna de velocidad prefijada 2 [1/min] Ajuste de fábrica: 0 1/min p1015[0...n] Consigna fija de veloci- Consigna fija de velocidad 15...
-
Página 239: Cálculo De Consignas
Puesta en marcha avanzada 6.16 Cálculo de consignas 6.16 Cálculo de consignas 6.16.1 Resumen Resumen El acondicionamiento de consigna influye sobre esta a través de las siguientes funciones: ● La orden "Invertir" invierte el sentido de giro del motor. ● La función "Bloquear sentido de giro" evita que el motor gire en el sentido incorrecto, lo cual puede resultar conveniente, p. -
Página 240: Inversión De Consigna
Puesta en marcha avanzada 6.16 Cálculo de consignas 6.16.2 Inversión de consigna Descripción del funcionamiento La función invierte el signo de la consigna mediante una señal binaria. Ejemplo Para invertir la consigna a través de una señal externa, interconecte el parámetro p1113 con una señal binaria de su elección. -
Página 241: Bloqueo Del Sentido De Giro
Puesta en marcha avanzada 6.16 Cálculo de consignas 6.16.3 Bloqueo del sentido de giro Descripción del funcionamiento En el ajuste de fábrica del convertidor, los dos sentidos de giro del motor están habilitados. Para bloquear permanentemente un sentido de giro, ajuste el parámetro correspondiente con el valor = 1. -
Página 242: Bandas Inhibidas Y Velocidad Mínima
Puesta en marcha avanzada 6.16 Cálculo de consignas 6.16.4 Bandas inhibidas y velocidad mínima Bandas inhibidas El convertidor dispone de cuatro bandas inhibidas que evitan el funcionamiento permanente del motor en un determinado rango de velocidades. Encontrará más información en el esquema de funciones 3050 del Manual de listas. -
Página 243: Limitación De Velocidad
Puesta en marcha avanzada 6.16 Cálculo de consignas 6.16.5 Limitación de velocidad La velocidad máxima limita el rango de la consigna de velocidad en los dos sentidos de giro. Al sobrepasar la velocidad máxima el convertidor genera un aviso (fallo o alarma). Si necesita limitar la velocidad de forma diferente para cada sentido de giro, puede definir límites de velocidad para cada sentido. -
Página 244: Generador De Rampa
Puesta en marcha avanzada 6.16 Cálculo de consignas 6.16.6 Generador de rampa El generador de rampa en el canal de consigna limita la velocidad de cambio en la consigna de velocidad (aceleración). Al reducir la aceleración se reduce el par acelerador del motor. De este modo, el motor descarga la mecánica de la máquina accionada. - Página 245 Puesta en marcha avanzada 6.16 Cálculo de consignas Tabla 6- 48 Parámetros de ajuste del generador de rampa avanzado Parámetro Descripción p1115 Generador de rampa Selección (ajuste de fábrica: 1) Seleccionar el generador de rampa: 0: Generador de rampa simple 1: Generador de rampa avanzado p1120 Generador de rampa Tiempo de aceleración (ajuste de fábrica: 10 s)
-
Página 246: Generador De Rampa Simple
Puesta en marcha avanzada 6.16 Cálculo de consignas 3. Evalúe el comportamiento del accionamiento. – Si el motor acelera demasiado lentamente, reduzca el tiempo de aceleración. Un tiempo de aceleración demasiado bajo provoca que el motor alcance su límite de intensidad al acelerar y no pueda ajustarse temporalmente a la consigna de velocidad. -
Página 247: Modificación Del Tiempo De Aceleración Y Deceleración Durante El Funcionamiento
Puesta en marcha avanzada 6.16 Cálculo de consignas A diferencia del generador de rampa avanzado, el generador de rampa simple no utiliza tiempos de redondeo. Tabla 6- 49 Parámetros para ajustar el generador de rampa simple Parámetro Descripción p1115 = 0 Generador de rampa Selección (ajuste de fábrica: 1) Seleccionar el generador de rampa: 0: Generador de rampa simple... -
Página 248: Regulador Tecnológico Pid
El convertidor recibe el valor para el escalado de los tiempos de aceleración y deceleración a través de la palabra de recepción PZD 3. ❒ Para más información, visite la web: Manual de funciones (https://support.industry.siemens.com/cs/ww/es/view/60467055/29243398027) 6.17 Regulador tecnológico PID Vista general El regulador tecnológico regula magnitudes de proceso, como p. ej., la presión, la temperatura, el nivel o el caudal. - Página 249 Puesta en marcha avanzada 6.17 Regulador tecnológico PID Requisito - Otras funciones La regulación del motor está ajustada. Herramientas Para modificar los ajustes de la función puede utilizar, p. ej., un Operator Panel o una herramienta para PC. Descripción del funcionamiento Esquema de funciones El regulador tecnológico es de tipo PID (regulador con acción proporcional, integral y diferencial).
- Página 250 Puesta en marcha avanzada 6.17 Regulador tecnológico PID Ajuste de los parámetros del regulador K Procedimiento 1. Ajuste provisionalmente a cero el tiempo de aceleración (subida) y deceleración (bajada) del generador de rampa (p2257 y p2258). 2. Especifique un escalón de consigna y observe el valor real correspondiente, p. ej. con la función Trace de STARTER.
- Página 251 Puesta en marcha avanzada 6.17 Regulador tecnológico PID Ejemplo: la salida del regulador tecnológico emite la consigna de velocidad para una bomba. La bomba solo debe girar en sentido positivo. Parámetro Tabla 6- 51 Configuración básica Parámetro Descripción Ajuste p2200 BI: Habilitar el regulador Señal 1: El regulador tecnológico está...
-
Página 252: Regulación Del Motor
● Regulador PID: funcionamiento de la acción D, bloqueo de la acción I y sentido de regulación ● Habilitación, limitación de la salida del regulador y reacción a errores FAQ (http://support.automation.siemens.com/WW/view/es/92556266) 6.18 Regulación del motor El convertidor dispone de dos métodos alternativos para regular la velocidad del motor: ●... -
Página 253: Control Por U/F
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.1 Control por U/f Vista general del control por U/f El control por U/f es una regulación de velocidad con las siguientes características: ● El convertidor regula la tensión de salida tomando como base la característica U/f ●... -
Página 254: Características Del Control Por U/F
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.1.1 Características del control por U/f El convertidor cuenta con diferentes características U/f. ① La elevación de tensión de la característica optimiza la regulación de velocidad en las velocida- des bajas. ② En la regulación corriente-flujo (FCC), el convertidor compensa la caída de tensión en la resis- tencia del estátor del motor. -
Página 255: Elección De La Característica U/F
Puesta en marcha avanzada 6.18 Regulación del motor El valor de la tensión de salida con frecuencia asignada del motor depende, entre otras cosas, de las siguientes magnitudes: ● Relación entre el tamaño del convertidor y el tamaño del motor ●... - Página 256 Puesta en marcha avanzada 6.18 Regulación del motor Requisito Ejemplos de Nota Característica Parámetro aplicación Característica U/f ajustable Característica p1300 = 3 ajustable Característica U/f con con- La relación entre la frecuencia y la tensión no Consigna de p1300 = 19 signa de tensión indepen- se calcula en el convertidor sino que la espe- tensión inde-...
-
Página 257: Optimización Del Arranque Del Motor
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.1.3 Optimización del arranque del motor Tras seleccionar la característica U/f, en la mayoría de las aplicaciones no se requieren ajustes adicionales. En las siguientes circunstancias, el motor no puede acelerar hasta su velocidad de consigna tras la conexión: ●... - Página 258 Puesta en marcha avanzada 6.18 Regulación del motor 5. Compruebe si el motor sigue la consigna. 6. Aumente en caso necesario la elevación de tensión p1311 hasta que el motor acelere sin problemas. El parámetro p1312 debe aumentarse adicionalmente en las aplicaciones que tengan un par de despegue alto, con el fin de conseguir un comportamiento satisfactorio del motor.
-
Página 259: Regulación Vectorial Sin Sensores Y Con Regulador De Velocidad
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.2 Regulación vectorial sin sensores y con regulador de velocidad 6.18.2.1 Estructura de la regulación vectorial sin encóder Resumen La regulación vectorial consta de una regulación de intensidad y de una regulación de velocidad de orden superior. -
Página 260: Ajustes Necesarios
Puesta en marcha avanzada 6.18 Regulación del motor mayor a la frecuencia de salida. La mayor frecuencia de salida da lugar también a un deslizamiento mayor en el motor, que es proporcional al par de aceleración. Los reguladores mantienen el flujo del motor constante para todas las tensiones de salida y ajustan la componente de intensidad adecuada I en el motor. -
Página 261: Optimización Del Regulador De Velocidad En Lazo Cerrado
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.2.2 Optimización del regulador de velocidad en lazo cerrado Comportamiento de regulación óptimo, reoptimización no necesaria Requisitos de evaluación del comportamiento del regulador: ● El momento de inercia de la carga es constante e independiente de la velocidad de giro ●... - Página 262 Puesta en marcha avanzada 6.18 Regulación del motor ● El convertidor necesita para acelerar un 10 % ... 50 % del par asignado. En caso necesario, ajuste el tiempo de aceleración y deceleración del generador de rampa (p1120 y p1121). ●...
-
Página 263: Dominio De Aplicaciones Críticas
Puesta en marcha avanzada 6.18 Regulación del motor Dominio de aplicaciones críticas En caso de accionamientos con momento de inercia de carga elevado y sin reductor, o con un acoplamiento vibratorio del motor y la carga, la regulación de velocidad puede volverse inestable. -
Página 264: Ajustes Especiales Con Cargas Vivas
Puesta en marcha avanzada 6.18 Regulación del motor La conmutación estática permite una distribución uniforme del par entre varios accionamientos acoplados mecánicamente. El estatismo reduce la consigna de velocidad en función de la consigna de par: Figura 6-52 Efecto del estatismo en el regulador de velocidad Con el estatismo activo, los generadores de rampa de todos los accionamientos acoplados deben estar ajustados con idénticos tiempos de arranque, tiempos de deceleración y redondeos. -
Página 265: Característica De Fricción
Puesta en marcha avanzada 6.18 Regulación del motor Si se utiliza la regulación vectorial sin encóder con una carga viva, es necesario aplicar los siguientes ajustes: ● Ajuste los siguientes parámetros: Par. Explicación p1750 Modelo de motor Configuración Bit 07 = 1 Utilización de límites de conmutación robustos p1610 Consigna de par estática (sin encóder) (ajuste de fábrica: 50 %) - Página 266 Puesta en marcha avanzada 6.18 Regulación del motor Figura 6-54 Característica de fricción Los puntos de interpolación de la característica de fricción están definidos para velocidades positivas. En el sentido de giro negativo, el convertidor utiliza los puntos de interpolación de signo negativo.
- Página 267 Puesta en marcha avanzada 6.18 Regulación del motor Parámetro Parámetro Explicación p3820 … Puntos de interpolación de la característica de fricción [1/min; Nm] p2839 r3840 Característica de fricción Palabra de estado Señal 1: Característica de fricción OK Señal 1: La determinación de la característica de fricción está activa Señal 1: La determinación de la característica de fricción ha terminado Señal 1: La determinación de la característica de fricción se ha cancelado Señal 1: Característica de fricción Sentido positivo...
-
Página 268: Estimador De Momento De Inercia
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.2.5 Estimador de momento de inercia Generalidades A partir del momento de inercia de la carga y del cambio en la consigna de velocidad, el convertidor calcula el par de aceleración que el motor necesita. A través del preajuste del regulador de velocidad, el par de aceleración especifica el porcentaje principal de la consigna de par. - Página 269 Puesta en marcha avanzada 6.18 Regulación del motor Cuando se utilice el estimador de momento de inercia, se recomienda activar también la característica de fricción. Característica de fricción (Página 263) ¿Cómo calcula el par de carga el convertidor? Figura 6-58 Cálculo del par de carga A baja velocidad, el convertidor calcula el par de carga M a partir del par motor real.
- Página 270 Puesta en marcha avanzada 6.18 Regulación del motor En caso de cambios de velocidad mayores, el convertidor calcula inicialmente el par de aceleración M como la diferencia entre el par motor M , el par de carga M y el par de fricción M El momento de inercia J del motor y de la carga se obtiene a partir del par de aceleración y la aceleración angular α...
-
Página 271: Activación Del Estimador De Momento De Inercia
Puesta en marcha avanzada 6.18 Regulación del motor Se dispone de estas opciones para determinar la curva característica: ● La curva característica se conoce gracias a otras mediciones. En este caso se deben ajustar los parámetros a valores conocidos durante la puesta en marcha del sistema. ●... - Página 272 Puesta en marcha avanzada 6.18 Regulación del motor Parámetro Explicación p1400 Configuración del control de velocidad .18 Señal 1: Estimador de momento de inercia activo .20 Señal 1: Modelo de aceleración activado .22 Señal 1 Retener el valor del estimador de momento de inercia al desconectar el motor Señal 0 Restablecer el valor del estimador de momento de inercia al valor...
- Página 273 Puesta en marcha avanzada 6.18 Regulación del motor Ajustes avanzados Parámetro Explicación p1226 Umbral de velocidad para detección de parada (ajuste de fábrica: 20 rpm) El estimador de momento de inercia solo mide el par de carga para velocidades ≥ p1226.
- Página 274 Puesta en marcha avanzada 6.18 Regulación del motor Parámetro Explicación p5312 Preajuste del momento de inercia lineal Para un sentido positivo de giro: positivo (ajuste de fábrica: 0 1/s Momento de inercia = p5312 × par de carga + p5313 p5313 Preajuste del momento de inercia cons- tante positivo (ajuste de fábrica: 0 kgm...
-
Página 275: Identificación De La Posición Polar
Si utiliza un motor Siemens, el convertidor selecciona automáticamente la técnica adecuada para determinar la posición polar, e inicia la identificación de la posición polar cuando se le solicita. -
Página 276: Regulación De Par
Puesta en marcha avanzada 6.18 Regulación del motor 6.18.3 Regulación de par La regulación de par forma parte de la regulación vectorial y normalmente recibe su consigna de la salida del regulador de velocidad. Al desactivar el regulador de velocidad y especificar directamente la consigna de par, la regulación de velocidad se convierte en una regulación de par. -
Página 277: Frenado Eléctrico Del Motor
Puesta en marcha avanzada 6.19 Frenado eléctrico del motor Parámetro Descripción p1300 Tipo de regulación: 22: Regulación de par sin encóder p0300 … Los datos del motor se transfieren desde la placa de características en la puesta en p0360 marcha rápida y se calculan con la identificación de datos del motor. p1511 Par adicional p1520... - Página 278 Puesta en marcha avanzada 6.19 Frenado eléctrico del motor ● Rectificadoras ● Cintas transportadoras El frenado por corriente continua no es admisible en aplicaciones con cargas suspendidas, p. ej., aparatos de elevación o transportadores verticales. Función ATENCIÓN Sobrecalentamiento del motor por frenado por corriente continua Si el frenado por corriente continua se utiliza de forma demasiado prolongada o frecuente, el motor se sobrecalienta.
- Página 279 Puesta en marcha avanzada 6.19 Frenado eléctrico del motor Frenado por corriente continua cuando se produce un fallo Requisitos: El número de fallo y la reacción a fallo se han asignado mediante p2100 y p2101. Función: 1. Se produce un fallo asignado a la reacción de frenado por corriente continua.
- Página 280 Puesta en marcha avanzada 6.19 Frenado eléctrico del motor Ajustes para el frenado por corriente continua Parámetro Descripción p0347 Tiempo de desexcitación del motor (cálculo tras la puesta en marcha rápida) Si el tiempo de desexcitación es demasiado breve, durante el frenado por corriente continua puede producirse la desconexión por sobreintensidad.
-
Página 281: Frenado Por Resistencia
Puesta en marcha avanzada 6.19 Frenado eléctrico del motor Tensiones de frenado por DC La tensión de red disponible para el variador determina la cantidad de tensión de frenado rectificada disponible para la función de frenado por DC. En la tabla siguiente, se muestran ejemplos de la correlación entre la tensión AC de entrada y la tensión DC disponible para la función de frenado por DC. - Página 282 Puesta en marcha avanzada 6.19 Frenado eléctrico del motor Modo de funcionamiento La tensión del circuito intermedio aumenta cuando el motor proporciona al frenar potencia generadora al convertidor. La potencia generadora provoca el aumento de la tensión del circuito intermedio en el convertidor. En función de la tensión del circuito intermedio, el convertidor transmite la potencia generadora a la resistencia de freno a través del chopper de freno.
-
Página 283: Ajuste Del Frenado Por Resistencia
Ajuste con p0219 la potencia de frenado máxima que la resistencia de freno debe ab- sorber. Tabla 3-3 Opciones de SINAMICS G110M (Página 31) Con una potencia de frenado demasiado reducida, el convertidor prolonga el tiempo de deceleración del motor. -
Página 284: Protección Contra Sobreintensidad
Puesta en marcha avanzada 6.20 Protección contra sobreintensidad 6.20 Protección contra sobreintensidad La regulación vectorial se encarga de que la intensidad del motor permanezca dentro de los límites de par ajustados. Si se utiliza el control por U/f, no se pueden ajustar límites de par. El control por U/f impide una intensidad de motor demasiado elevada modificando la frecuencia de salida y la tensión del motor (regulador I-máx) Regulador I-máx... -
Página 285: Protección Del Convertidor Con Vigilancia De Temperatura
Puesta en marcha avanzada 6.21 Protección del convertidor con vigilancia de temperatura 6.21 Protección del convertidor con vigilancia de temperatura La temperatura del convertidor depende fundamentalmente de los siguientes factores: ● la temperatura ambiente; ● las pérdidas óhmicas, que aumentan en proporción a la intensidad de salida; ●... - Página 286 Puesta en marcha avanzada 6.21 Protección del convertidor con vigilancia de temperatura Si la medida no puede impedir la sobrecarga térmica del convertidor, este desconecta el motor con el fallo F30024. Reacción en sobrecarga con p0290 = 1 El convertidor desconecta el motor de inmediato con el fallo F30024. Reacción en sobrecarga con p0290 = 2 Recomendamos este ajuste para accionamientos con par cuadrático, p.
- Página 287 Puesta en marcha avanzada 6.21 Protección del convertidor con vigilancia de temperatura Si no es posible reducir provisionalmente la frecuencia de pulsación o evitar la sobrecarga térmica de la etapa de potencia, el convertidor desconecta el motor con el fallo F30024. Reacción en sobrecarga con p0290 = 12 El convertidor reacciona en dos etapas: 1.
-
Página 288: Vigilancia De La Temperatura Del Motor Mediante Un Sensor De Temperatura
Puesta en marcha avanzada 6.22 Vigilancia de la temperatura del motor mediante un sensor de temperatura 6.22 Vigilancia de la temperatura del motor mediante un sensor de temperatura Puede usar uno de los sensores siguientes para proteger el motor frente al exceso de temperatura: ●... - Página 289 Puesta en marcha avanzada 6.22 Vigilancia de la temperatura del motor mediante un sensor de temperatura Con un sensor KTY, el convertidor vigila tanto la temperatura del motor como el propio sensor para detectar roturas de hilo o cortocircuitos: ● Vigilancia de temperatura: Con un sensor KTY, el convertidor evalúa la temperatura del motor en el rango de -48 °C ...
-
Página 290: Ajuste De Parámetros Para La Vigilancia De Temperatura
Puesta en marcha avanzada 6.22 Vigilancia de la temperatura del motor mediante un sensor de temperatura Sensor Pt1000 Con un sensor Pt1000, el convertidor vigila tanto la temperatura del motor como el propio sensor para detectar roturas de hilo o cortocircuitos: ●... - Página 291 Puesta en marcha avanzada 6.22 Vigilancia de la temperatura del motor mediante un sensor de temperatura Parámetro Descripción Alarma A07910 y fallo F07011 El convertidor reduce el límite de intensidad. Alarma A07910 y fallo F07011 El convertidor no reduce el límite de intensidad. p0640 Límite de intensidad [A] Encontrará...
-
Página 292: Protección Del Motor Mediante El Cálculo De La Temperatura
Puesta en marcha avanzada 6.23 Protección del motor mediante el cálculo de la temperatura 6.23 Protección del motor mediante el cálculo de la temperatura El convertidor calcula la temperatura del motor basándose en un modelo térmico de motor. El modelo térmico de motor responde más rápido a los incrementos de temperatura que un sensor de temperatura. - Página 293 Puesta en marcha avanzada 6.23 Protección del motor mediante el cálculo de la temperatura Parámetro Descripción p0344 Peso del motor (para tipo de motor térmico) (ajuste de fábri- Después de seleccionar ca: 0,0 kg) un motor de inducción (p0300) o un motor de p0604 Umbral de alarma Mod_temp_mot 2/KTY (ajuste de fábrica: inducción de lista...
-
Página 294: Protección Del Motor Y Del Convertidor Mediante Limitación De Tensión
Puesta en marcha avanzada 6.24 Protección del motor y del convertidor mediante limitación de tensión 6.24 Protección del motor y del convertidor mediante limitación de tensión ¿Qué provoca una tensión demasiado elevada? Para accionar la carga, un motor eléctrico transforma la energía eléctrica en energía mecánica. -
Página 295: Vigilancia De La Carga Accionada
Puesta en marcha avanzada 6.25 Vigilancia de la carga accionada Frenado eléctrico del motor (Página 275) Parámetros de la regulación de Vdc_máx Los parámetros varían en función del tipo de regulación del motor. Parámetros del Parámetros de Descripción control por U/f la regulación vectorial p1280 = 1... -
Página 296: Vigilancia De Marcha En Vacío
Puesta en marcha avanzada 6.25 Vigilancia de la carga accionada 6.25.1 Vigilancia de marcha en vacío En aplicaciones con ventiladores, compresores o cintas transportadoras, una intensidad muy baja del motor indica que se ha interrumpido la transmisión de fuerza entre el motor y la carga. -
Página 297: Vigilancia De Giro
Puesta en marcha avanzada 6.25 Vigilancia de la carga accionada 6.25.2 Vigilancia de giro El convertidor vigila la velocidad de giro o la velocidad lineal de un componente de la máquina por medio de un encóder electrónico o electromecánico, como p. ej., un detector de proximidad. -
Página 298: Vigilancia De Par
Puesta en marcha avanzada 6.25 Vigilancia de la carga accionada 6.25.3 Vigilancia de par En aplicaciones con ventiladores, bombas o compresores con característica de flujo, a cada velocidad le corresponde un par según una característica determinada. En el caso de los ventiladores, un par demasiado bajo indica que se ha interrumpido la transmisión de fuerza entre el motor y la carga. - Página 299 Puesta en marcha avanzada 6.25 Vigilancia de la carga accionada Parámetro Descripción p2192 Vigilancia de carga Retardo Tiempo de retardo para el aviso "Salir de la banda de tolerancia de la vigilancia de par" p2193 = 1 Configuración de la vigilancia de carga (ajuste de fábrica: 1) 1: Vigilancia de par y pérdida de carga En aplicaciones con ventiladores, bombas o compresores con característica de flujo, a cada velocidad le corresponde un par según una característica determinada.
- Página 300 Puesta en marcha avanzada 6.25 Vigilancia de la carga accionada Vigilancia de marcha en vacío (Página 294) Parámetro Descripción p2165 Vigilancia de carga Vigilancia bloqueo Umbral superior p2168 Vigilancia de carga Vigilancia de bloqueo Umbral de par p2181 Vigilancia de carga Reacción A07891: Vigilancia de carga bomba/ventilador bloqueados A07892: Vigilancia de carga bomba/ventilador sin carga A07893: Vigilancia de carga bomba fuga...
-
Página 301: Optimización De Rendimiento
Puesta en marcha avanzada 6.26 Optimización de rendimiento 6.26 Optimización de rendimiento Vista general La optimización de rendimiento reduce las pérdidas del motor en la medida de lo posible. La optimización de rendimiento activa tiene las siguientes ventajas: ● Menores costes energéticos ●... - Página 302 Puesta en marcha avanzada 6.26 Optimización de rendimiento Sin embargo, la velocidad y el par son especificados por la máquina accionada en cada aplicación. Por ello, la única magnitud variable que queda disponible para la optimización de rendimiento es el flujo. El convertidor cuenta con dos métodos distintos de optimización de rendimiento.
- Página 303 Puesta en marcha avanzada 6.26 Optimización de rendimiento Optimización de rendimiento, método 1 Figura 6-71 Reducción de la consigna de flujo en la zona de carga parcial del motor Entre la marcha en vacío y el par asignado, el motor trabaja en la zona de carga parcial. En función de p1580, el convertidor reduce la consigna de flujo de modo lineal con el par en la zona de carga parcial.
- Página 304 Puesta en marcha avanzada 6.26 Optimización de rendimiento Tabla 6- 61 Optimización de rendimiento, método 1 Parámetro Descripción Ajustes p1570 Consigna de flujo [%] Ajuste de fábrica: 100 % p1580 Optimización de rendimiento 0 %: Optimización de rendimiento desactivada. 100 %: El convertidor reduce la consigna de flujo durante la marcha en vacío a un 50 % del flujo asignado del motor.
-
Página 305: Cálculo Del Ahorro De Energía Para Turbomáquinas
Puesta en marcha avanzada 6.27 Cálculo del ahorro de energía para turbomáquinas 6.27 Cálculo del ahorro de energía para turbomáquinas Cuando el caudal se regula mecánicamente mediante válvulas de compuerta o de mariposa, las turbomáquinas funcionan con velocidad constante según la frecuencia de red. Figura 6-73 Regulación de flujo con bomba y válvula de mariposa en una red de 50 Hz Cuanto menor es el caudal, peor es el rendimiento de la turbomáquina. - Página 306 Puesta en marcha avanzada 6.27 Cálculo del ahorro de energía para turbomáquinas Parámetro Descripción r0039 Datos de energía [kWh] Balance energético Consumo de energía desde el último restablecimiento Energía consumida desde el último restablecimiento Energía realimentada desde el último restablecimiento p0040 Resetear el indicador de consumo de energía Un cambio de señal 0 →...
-
Página 307: Conmutación Entre Diferentes Ajustes
Puesta en marcha avanzada 6.28 Conmutación entre diferentes ajustes 6.28 Conmutación entre diferentes ajustes Hay aplicaciones para las que se necesitan diferentes ajustes del convertidor. Ejemplo: Varios motores se operan con un convertidor. El convertidor debe funcionar con los datos de motor correspondientes y el generador de rampa adecuado para cada motor. - Página 308 Puesta en marcha avanzada 6.28 Conmutación entre diferentes ajustes Tabla 6- 63 Parámetros para la conmutación de los juegos de datos de accionamiento: Parámetro Descripción p0820[0...n] Selección juego de datos de accto. DDS Si utiliza varios juegos de datos de man- bit 0 do CDS, debe ajustar estos parámetros para cada CDS.
-
Página 309: Copia De Seguridad De Datos Y Puesta En Marcha En Serie
Copia de seguridad de datos y puesta en marcha en serie Almacenamiento de ajustes fuera del convertidor Después de la puesta en marcha deben guardarse los ajustes en el convertidor de forma no volátil. Recomendamos guardar una copia de seguridad adicional de los ajustes en un medio de almacenamiento fuera del convertidor. -
Página 310: Copia De Seguridad Y Transferencia De Ajustes Mediante Tarjeta De Memoria
Copia de seguridad de datos y puesta en marcha en serie 7.1 Copia de seguridad y transferencia de ajustes mediante tarjeta de memoria Copia de seguridad y transferencia de ajustes mediante tarjeta de memoria 7.1.1 Tarjetas de memoria Tarjetas de memoria recomendadas Tabla 7- 1 Tarjetas de memoria para guardar los ajustes del convertidor Volumen del suministro... -
Página 311: Guardado De Ajustes En La Tarjeta De Memoria
Copia de seguridad de datos y puesta en marcha en serie 7.1 Copia de seguridad y transferencia de ajustes mediante tarjeta de memoria Limitaciones de funciones con tarjetas de memoria de otros fabricantes Las siguientes funciones no están disponibles, o solo de forma limitada, con tarjetas de otros fabricantes: ●... -
Página 312: Carga Manual
Copia de seguridad de datos y puesta en marcha en serie 7.1 Copia de seguridad y transferencia de ajustes mediante tarjeta de memoria Carga manual Para cargar manualmente los ajustes de parámetros, deberá transferir los datos a la tarjeta de memoria de la siguiente forma: 1. -
Página 313: Transferencia De La Configuración De La Tarjeta De Memoria
Copia de seguridad de datos y puesta en marcha en serie 7.1 Copia de seguridad y transferencia de ajustes mediante tarjeta de memoria 7.1.3 Transferencia de la configuración de la tarjeta de memoria Si desea transferir los ajustes de parámetros de una tarjeta de memoria al variador (descarga), tiene dos opciones: Descarga automática Para cargar automáticamente los ajustes de parámetros, deberá... - Página 314 Copia de seguridad de datos y puesta en marcha en serie 7.1 Copia de seguridad y transferencia de ajustes mediante tarjeta de memoria 6. Instale el Power Module en la caja TH, asegurándose de que las juntas estén fijadas correctamente y de que se use el par de apriete correcto (2,0 Nm) para garantizar la clasificación IP del variador.
-
Página 315: Activación Del Aviso De Tarjeta De Memoria No Insertada
Extraer con seguridad la tarjeta de memoria Estado Señal 1: Tarjeta de memoria insertada Señal 1: Tarjeta de memoria activada Señal 1: Tarjeta de memoria SIEMENS Señal 1: Tarjeta de memoria utilizada por el PC como soporte de datos Variador distribuido para motorreductores SIMOGEAR... -
Página 316: Guardar Los Ajustes En Un Pc
Copia de seguridad de datos y puesta en marcha en serie 7.2 Guardar los ajustes en un PC Guardar los ajustes en un PC Los ajustes del variador se pueden transferir a una PG/un PC o viceversa (los datos de una PG/un PC al variador). - Página 317 Copia de seguridad de datos y puesta en marcha en serie 7.2 Guardar los ajustes en un PC Procedimiento con Startdrive sin funciones de seguridad habilitadas 1. Pase a online. 2. En el menú contextual, seleccione "Cargar en dispositivo" > "Hardware y software". 3.
-
Página 318: Otras Posibilidades Para Guardar Ajustes
En la tarjeta de memoria pueden guardarse, además de la configuración estándar del convertidor, otras 99 configuraciones. Encontrará más información en Internet: Opciones de memoria (http://support.automation.siemens.com/WW/view/en/43512514). Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 319: Protección Contra Escritura
Copia de seguridad de datos y puesta en marcha en serie 7.4 Protección contra escritura Protección contra escritura La protección contra escritura impide la modificación no autorizada de los ajustes del convertidor. Si trabaja con una herramienta para PC como STARTER, la protección contra escritura tan solo funciona online. -
Página 320: Excepciones De La Protección Contra Escritura
Protección de know-how con protección contra El convertidor solo puede funcionar copia básica con una tarjeta de memoria SIEMENS Protección de know-how con protección am- pliada contra copia Sustitución de un Control Module con protección de know- how activa (Página 353) - Página 321 Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how Descripción del funcionamiento La protección de know-how activada tiene el efecto siguiente: ● Con algunas excepciones, no pueden verse los valores de los parámetros de ajuste p … En lugar de los valores de los parámetros, en STARTER aparecerá...
- Página 322 Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how Protección de know-how sin protección contra copia Los ajustes del convertidor se pueden transferir a otros convertidores con una tarjeta de memoria, un Operator Panel, STARTER o Startdrive. Protección de know-how con protección contra copia básica Tras sustituir un convertidor, para poder utilizar el nuevo convertidor con los ajustes del convertidor sustituido sin conocimiento de la contraseña, la tarjeta de memoria debe estar...
-
Página 323: Ampliación De La Lista De Excepciones Para La Protección De Know-How
Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how 7.5.1 Ampliación de la lista de excepciones para la protección de know-how Con el ajuste de fábrica, la lista de excepciones solo incluye la contraseña para la protección de know-how. -
Página 324: Activación Y Desactivación De La Protección De Know-How
Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how 7.5.2 Activación y desactivación de la protección de know-how Activación de la protección de know-how Requisitos ● La puesta en marcha del convertidor ha concluido. ●... -
Página 325: Modificación De La Contraseña
Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how 7. Introduzca su contraseña. Longitud de la contraseña: 1 a 30 caracteres. Recomendaciones para la asignación de contraseñas: – Utilice exclusivamente caracteres ASCII. Si utiliza otros caracteres para la contraseña, todo cambio que se introduzca en la configuración de idioma de Windows después de activar la protección de know-how puede causar problemas en la posterior verificación de la contraseña. - Página 326 Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how 3. Con el botón derecho del ratón, abra el cuadro de diálogo "Protección de know-how para la unidad de accionamiento → Desactivar…". 4. Seleccione la opción deseada: –...
- Página 327 Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how Consulte también Protección contra escritura (Página 317) Herramientas de puesta en marcha (Página 104) Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
- Página 328 Copia de seguridad de datos y puesta en marcha en serie 7.5 Protección de know-how Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 329: Alarmas, Fallos Y Mensajes Del Sistema
Alarmas, fallos y mensajes del sistema Vista general de los LED de estado LED indicadores de estado El Power Module tiene varios LED de dos colores diseñados para indicar el estado operativo del variador. Los LED se utilizan para indicar los siguientes estados: ●... - Página 330 Alarmas, fallos y mensajes del sistema 8.2 Estados operativos señalizados por LED Parpadeo lento del LED Parpadeo rápido del LED Parpadeo del LED con frecuencia variable Para todas las indicaciones LED no descritas a continuación, consulte al servicio técnico. Tabla 8- 2 Estados básicos Explicación Estado temporal tras conectarse la alimentación...
- Página 331 Alarmas, fallos y mensajes del sistema 8.2 Estados operativos señalizados por LED Tabla 8- 4 Bus de campo PROFINET Explicación Comunicación vía PROFINET sin errores Bautizo del equipo activo Sin comunicación vía PROFINET Tabla 8- 5 Buses de campo PROFINET y PROFIBUS Explicación El intercambio de datos entre el convertidor y el controlador está...
-
Página 332: Tiempo Del Sistema
Alarmas, fallos y mensajes del sistema 8.3 Tiempo del sistema Explicación i/FLT Dirección de esclavo 0 Disparo del convertidor Tiempo del sistema La evaluación del tiempo del sistema del convertidor permite determinar si deben reemplazarse componentes sujetos a desgaste tales como ventiladores, motores y reductores. -
Página 333: Datos De Identification & Maintenance (I&M)
Ejemplo de conte- Válido para Válido para nido PROFINET PROFIBUS Manufacturer specific u8[10] 00 … 00 hex ✓ MANUFACTURER_ID 42d hex ✓ ✓ (=Siemens) ORDER_ID Visible String „6SL3246-0BA22- ✓ ✓ [20] 1FA0“ SERIAL_NUMBER Visible String „T-R32015957“ ✓ ✓ [16] HARDWARE_REVISION 0001 hex ✓... - Página 334 Alarmas, fallos y mensajes del sistema 8.4 Datos de Identification & Maintenance (I&M) Nombre Formato Ejemplo de conte- Válido para Válido para nido PROFINET PROFIBUS IM_VERSION u8[2] 01.02 ✓ ✓ IM_SUPPORTED bit[16] 001E hex ✓ ✓ Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 335: Alarmas, Memoria De Alarmas E Historial De Alarmas
Alarmas, fallos y mensajes del sistema 8.5 Alarmas, memoria de alarmas e historial de alarmas Alarmas, memoria de alarmas e historial de alarmas Alarmas Las alarmas tienen las siguientes características: ● Las alarmas entrantes no tienen un efecto directo en el convertidor. ●... - Página 336 Alarmas, fallos y mensajes del sistema 8.5 Alarmas, memoria de alarmas e historial de alarmas Historial de alarmas Figura 8-3 Traslado de alarmas eliminadas al historial Si la memoria de alarmas está llena y se produce otra más, el convertidor traslada las alarmas eliminadas al historial.
-
Página 337: Ajustes Avanzados Para Alarmas
Alarmas, fallos y mensajes del sistema 8.5 Alarmas, memoria de alarmas e historial de alarmas Parámetros de la memoria y del historial de alarmas Parámetro Descripción p2111 Contador de alarmas Número de alarmas producidas tras el último restablecimiento Con p2111 = 0 todas las alarmas eliminadas de la memoria [0...7] se trasladan al historial [8...63] r2122 Código de alarma... -
Página 338: Fallos, Memoria De Fallos E Historial De Fallos
Alarmas, fallos y mensajes del sistema 8.6 Fallos, memoria de fallos e historial de fallos Fallos, memoria de fallos e historial de fallos Fallos Los fallos tienen las siguientes características: ● Por lo general, un fallo provoca la desconexión del motor. ●... -
Página 339: Confirmación Del Fallo
Alarmas, fallos y mensajes del sistema 8.6 Fallos, memoria de fallos e historial de fallos Confirmación del fallo Existen varias posibilidades para confirmar un fallo: ● PROFIdrive Palabra de mando 1, bit 7 (r2090.7) ● Confirmación a través de una entrada digital ●... -
Página 340: Parámetros De La Memoria Y Del Historial De Fallos
Alarmas, fallos y mensajes del sistema 8.6 Fallos, memoria de fallos e historial de fallos Borrar historial de fallos Para borrar todos los fallos del historial, ajuste el parámetro p0952 a cero. Parámetros de la memoria y del historial de fallos Parámetro Descripción r0945... - Página 341 Alarmas, fallos y mensajes del sistema 8.6 Fallos, memoria de fallos e historial de fallos Parámetro Descripción p2126[0…19] Ajustar el número de fallo para el modo de confirmación Selección de los fallos para los que se modifica el tipo de confirmación. Se puede modificar el tipo de confirmación para un máximo de 20 códigos de fallo distintos.
-
Página 342: Lista De Alarmas Y Fallos
Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Lista de alarmas y fallos Axxxxx: Alarma Fyyyyy: Fallo Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... - Página 343 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Tabla 8- 7 Alarmas y fallos más importantes Número Causa Remedio F01000 Fallo de software en CU Sustituir CU. F01001 Excepción de coma flotante Desconectar y volver a conectar la CU. F01015 Fallo de software en CU Actualizar el firmware o ponerse en contacto con la asis-...
- Página 344 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Número Causa Remedio A01900 PROFIBUS: telegrama de Explicación: un maestro PROFIBUS está intentando esta- configuración erróneo blecer una conexión con un telegrama de configuración erróneo. Comprobar la configuración de bus en el lado del maestro y del esclavo.
- Página 345 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Número Causa Remedio F07086 Conmutación de unidades: Comprobar los valores de parámetros adaptados y, si es F07088 Infracción de los límites de necesario, corregirlos. parámetros F07320 Rearranque automático Aumentar el número de intentos de rearranque (p1211).
- Página 346 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Número Causa Remedio A07805 Accionamiento: Sobrecarga Reducir la carga permanente. • en etapa de potencia I2t Adaptar el ciclo de carga. • Comprobar la asignación de las intensidades nomina- •...
- Página 347 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Número Causa Remedio A07921 Par/velocidad demasiado Comprobar la conexión entre el motor y la carga. • alto Adaptar la parametrización correspondiente a la carga. • A07922 Par/velocidad fuera de tolerancia F07923 Par/velocidad demasiado...
- Página 348 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Número Causa Remedio F30001 Sobrecorriente Verificar lo siguiente: Datos del motor; si es necesario, realizar la puesta en • marcha Método de conexión del motor (Υ/Δ) • Funcionamiento U/f: asignación de intensidades nomi- •...
- Página 349 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Número Causa Remedio F30021 Defecto a tierra Comprobar las conexiones de los cables de alimenta- • ción. Comprobar el motor. • Comprobar el transformador de corriente. • Comprobar los cables y contactos de la conexión de •...
- Página 350 Alarmas, fallos y mensajes del sistema 8.7 Lista de alarmas y fallos Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 351: Mantenimiento Correctivo
Mantenimiento correctivo Compatibilidad con los repuestos Mejoras en el marco del mantenimiento perfectivo Los componentes del convertidor están sometidos a procesos de mejora continuos en el marco del mantenimiento perfectivo. El mantenimiento perfectivo incluye, p. ej., medidas para mejorar la robustez o modificaciones de hardware, que se hacen necesarias debido a la descatalogación de componentes. -
Página 352: Reparación
• El convertidor solo pueden repararlo las personas siguientes: – Servicio técnico de Siemens – Centro de reparación autorizado por Siemens – Personal especializado con amplios conocimientos sobre todas las advertencias y procedimientos operativos especificados en este manual •... - Página 353 Mantenimiento correctivo 9.2 Sustitución de componentes del convertidor Sustitución de componentes, general Sustitución del Power Module con copia de seguridad ex- Sustitución de la Control Unit terna de los ajustes, por ejemplo, en una tarjeta de memoria Sustitución: Sustitución: Sustitución: Sustitución: Mismo tipo Mismo tipo...
-
Página 354: Sustitución Del Control Module
No sustituir componentes en caliente Los componentes del sistema SINAMICS G110M no se pueden intercambiar en caliente, instalar ni extraer sin proteger previamente las cargas controladas por la aplicación, desconectar la alimentación eléctrica del sistema y esperar 5 minutos para dejar que los componentes eléctricos del sistema se descarguen por completo. -
Página 355: Sustitución De Un Control Module Con Protección De Know-How Activa
Mantenimiento correctivo 9.2 Sustitución de componentes del convertidor 6. Desatornille los cuatro tornillos autoblocantes de CM. 7. Retire el CM. Sustitución del Control Module 1. Instale el nuevo CM. 2. Fije el CM en su lugar mediante los cuatro tornillos autoblocantes. 3. - Página 356 9.2 Sustitución de componentes del convertidor Para no tener que realizar una nueva puesta en marcha, es necesario utilizar una tarjeta de memoria Siemens, y el fabricante de la máquina ha de disponer de una máquina de referencia idéntica. Para sustituir los equipos existen dos posibilidades: Posibilidad 1: el fabricante de la máquina conoce solo el número de serie del nuevo...
- Página 357 – Enviar el proyecto encriptado al cliente final, p. ej., por correo electrónico 3. El cliente final copia el proyecto en la tarjeta de memoria Siemens que corresponde a la máquina, la inserta en el convertidor y conecta la alimentación del convertidor.
-
Página 358: Sustitución Del Power Module
No sustituir componentes en caliente Los componentes del sistema SINAMICS G110M no se pueden intercambiar en caliente, instalar ni extraer sin proteger previamente las cargas controladas por la aplicación, desconectar la alimentación eléctrica del sistema y esperar 5 minutos para dejar que los componentes eléctricos del sistema se descarguen por completo. -
Página 359: Actualización Y Reversión Del Firmware
Preparación de la tarjeta de memoria para actualización o reversión de firmware Procedimiento 1. Descargue por Internet el firmware necesario en el PC. Descarga (https://support.industry.siemens.com/cs/ww/en/view/67364620) 2. Descomprima los archivos incluidos en un directorio del PC de su elección. 3. Traslade los archivos descomprimidos al directorio raíz de la tarjeta de memoria. -
Página 360: Resumen De La Actualización Y La Reversión Del Firmware
Mantenimiento correctivo 9.3 Actualización y reversión del firmware Resumen de la actualización y la reversión del firmware Manejo del usuario Reacción del convertidor Figura 9-2 Resumen de la actualización y la reversión del firmware Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 361: Actualización Del Firmware
Mantenimiento correctivo 9.3 Actualización y reversión del firmware 9.3.1 Actualización del firmware Al actualizar el firmware se sustituye el firmware del convertidor por una versión más reciente. Solo actualice el firmware a una versión más reciente si necesita la gama más amplia de funciones de esa nueva versión. - Página 362 Mantenimiento correctivo 9.3 Actualización y reversión del firmware 6. El variador transfiere el firmware de la tarjeta de memoria a su memoria. La transferencia tarda entre 5 y 10 minutos. Mientras se transfieren los datos, se mantiene la luz roja del LED RDY del variador. El LED BF parpadea en naranja con una frecuencia variable.
-
Página 363: Reversión Del Firmware A Una Versión Anterior
Mantenimiento correctivo 9.3 Actualización y reversión del firmware 11.Monte el Power Module. 12.Conecte la tensión de alimentación del variador de 24 V o la alimentación del variador de 400 V. 13.Si la actualización del firmware se ha realizado correctamente, el LED RDY del convertidor cambia a verde después de unos segundos. - Página 364 Mantenimiento correctivo 9.3 Actualización y reversión del firmware Procedimiento 1. Desconecte la tensión de alimentación eléctrica del variador de 24 V. Si el variador está dotado de un módulo para la alimentación eléctrica de 24 V interna, en lugar de la alimentación eléctrica de 24 V, debe desconectar la alimentación de 400 V. 2.
- Página 365 Mantenimiento correctivo 9.3 Actualización y reversión del firmware 6. El variador transfiere el firmware de la tarjeta de memoria a su memoria. La transferencia tarda entre 5 y 10 minutos. Mientras se transfieren los datos, se mantiene la luz roja del LED RDY del variador. El LED BF parpadea en naranja con una frecuencia variable.
-
Página 366: Corrección De Una Actualización O Reversión Del Firmware Errónea
Mantenimiento correctivo 9.3 Actualización y reversión del firmware 11.Monte el Power Module. 12.Conecte la tensión de alimentación del variador de 24 V o la alimentación del variador de 400 V. 13.Si el firmware se ha revertido correctamente a una versión anterior, después de varios segundos el LED RDY del variador pasa a verde. - Página 367 Mantenimiento correctivo 9.3 Actualización y reversión del firmware Corrección de una actualización o reversión errónea Para corregir una actualización o reversión del firmware errónea puede comprobar lo siguiente: ● ¿La versión del firmware cumple los requisitos del variador? – Para una actualización, como mínimo V4.7.x. –...
- Página 368 Mantenimiento correctivo 9.3 Actualización y reversión del firmware Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 369: Datos Técnicos
Datos técnicos 10.1 Prestaciones nominales del Control Module - CU240M Característica Especificación Tensión de funciona- 24 V DC de alimentación externa 24 V DC ± 15% miento Resolución de consigna 0,01 Hz digital; 0,01 Hz serie Entradas digitales 4 entradas digitales programables Tensión: ≤... -
Página 370: Prestaciones Nominales Del Power Module - Pm240M
Datos técnicos 10.2 Prestaciones nominales del Power Module - PM240M 10.2 Prestaciones nominales del Power Module - PM240M Prestaciones nominales generales Característica Especificación Rangos de potencias y 3 AC 380 V (- 10%) … 480 V (+ 10%) tensiones de funciona- Sobrecarga alta: de 0,37 kW a 4,0 kW (de 0,5 HP a 5,0 HP) miento de red Frecuencia de entrada... -
Página 371: Especificaciones Del Sinamics G110M
Datos técnicos 10.3 Especificaciones del SINAMICS G110M 10.3 Especificaciones del SINAMICS G110M Prestaciones nominales dependientes de la potencia Nota Deben usarse fusibles homologados UL. "Deben usarse fusibles homologados UL" debe indicar "A fin de que el sistema cumpla con los requisitos de UL, deben usarse fusibles de la clase J". Las características de estos fusibles deben ser iguales o inferiores a las características que se proporcionan en... -
Página 372: Resistencia Mínima Requerida Para Las Resistencias De Frenado
Datos técnicos 10.3 Especificaciones del SINAMICS G110M Referencia 6SL3517-… …1BE14-3AM0 Pérdidas 0,04 kW Caudal de aire de refrigeración requerido 4,8 l/s Sección de cable de red y motor 1 … 2,5 mm 18 … 14 AWG Par de apriete para cable de red y motor... -
Página 373: Temperatura Ambiente De Funcionamiento
Reducción de la potencia según la temperatura Rango de humedad La humedad relativa del aire para el SINAMICS G110M es del ≤ 95 %, sin condensación. Choques y vibraciones No deje caer el SINAMICS G110M ni lo exponga a choques repentinos. No instale el SINAMICS G110M en una zona en la que pueda estar sometido a vibraciones constantes. -
Página 374: Reducción De Intensidad En Función De La Altitud De Instalación
Datos técnicos 10.5 Reducción de intensidad en función de la altitud de instalación Nota Clasificación IP del motor Los motores del sistema G110M tienen un grado de protección IP estándar de IP54. El grado de protección IP del sistema G110M lo determina el grado de protección IP más bajo de sus componentes. -
Página 375: Frecuencia De Pulsación Y Reducción De Corriente
Datos técnicos 10.6 Frecuencia de pulsación y reducción de corriente 10.6 Frecuencia de pulsación y reducción de corriente Relación entre frecuencia de pulsación y reducción de corriente de carga básica de salida Tabla 10- 5 Reducción de corriente según la frecuencia de pulsación Potencia nominal Intensidad nominal de salida con frecuencia de pulsación de basada en LO... - Página 376 Datos técnicos 10.6 Frecuencia de pulsación y reducción de corriente Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...
-
Página 377: Anexo
Anexo Funciones nuevas y ampliadas A.1.1 Versión de firmware 4.7 SP10 Tabla A- 1 Funciones nuevas y modificaciones en las funciones del firmware 4.7 SP10 Función SINAMICS G120 G120D Nuevo parámetro r7844[1] para la visualización de la versión de firmware ✓... - Página 378 Anexo A.1 Funciones nuevas y ampliadas Función SINAMICS G120 G120D Puesta en marcha con datos de motor predefinidos para motores de ✓ ✓ ✓ ✓ reluctancia síncronos SIMOTICS GP/SD: Segunda generación: 1FP1 . 04 → 1FP1 . 14 • Otros tamaños: •...
-
Página 379: Versión De Firmware 4.7 Sp9
Power Module PM240-2 Soporte del motor síncrono de reluctancia 1FP3 ✓ Para operar el motor síncrono de reluctancia 1FP3 se necesita el Power Module PM240-2 y una habilitación selectiva por parte de SIEMENS Soporte del motor asíncrono 1LE5 ✓ ✓... - Página 380 Anexo A.1 Funciones nuevas y ampliadas Función SINAMICS G120 G120D Ampliación de una respuesta cuando no se ha introducido ninguna tarjeta ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓ de memoria en el convertidor: Parámetro r9401 como parámetro BiCo para la respuesta opcional al •...
- Página 381 Anexo A.1 Funciones nuevas y ampliadas Tabla A- 3 Funciones nuevas y modificaciones en las funciones del firmware 4.7 SP6 Función SINAMICS G120 G120D Compatibilidad con los Power Module PM240-2 tamaño FSF ✓ ✓ ✓ ✓ Compatibilidad con el Power Module PM240P-2, tamaño FSD … FSF ✓...
-
Página 382: Versión De Firmware 4.7 Sp3
Anexo A.1 Funciones nuevas y ampliadas A.1.3 Versión de firmware 4.7 SP3 Tabla A- 4 Funciones nuevas y modificaciones en las funciones del firmware 4.7 SP3 Función SINAMICS G120 G120D Soporte de los Power Modules PM240-2, tamaños FSD y FSE ✓... - Página 383 Anexo A.1 Funciones nuevas y ampliadas Función SINAMICS G120 G120D Clases de aplicación de SINAMICS "Standard Drive Control" y "Dynamic ✓ ✓ ✓ ✓ ✓ Drive Control" para simplificar la puesta en marcha y aumentar la robus- tez de la regulación del motor. Las clases de aplicación SINAMICS solo están disponibles con los si- guientes convertidores: SINAMICS G120C...
- Página 384 Anexo A.1 Funciones nuevas y ampliadas Función SINAMICS G120 G120D Ampliación de los sensores de temperatura con DIN-Ni1000 para las ✓ entradas analógicas AI 2 y AI 3 Comunicación vía AS-Interface. ✓ Ajuste predeterminado de la comunicación mediante AS-i: macros p0015 30, 31, 32 y 34 Ampliación de la comunicación mediante Modbus: ✓...
-
Página 385: Versión De Firmware 4.7
Anexo A.1 Funciones nuevas y ampliadas A.1.4 Versión de firmware 4.7 Tabla A- 5 Funciones nuevas y modificaciones en las funciones del firmware 4.7 Función SINAMICS G120 G120D Compatibilidad con juegos de datos de Identification & Maintenance ✓ ✓ ✓ ✓... -
Página 386: Versión De Firmware 4.6 Sp6
Anexo A.1 Funciones nuevas y ampliadas A.1.5 Versión de firmware 4.6 SP6 Tabla A- 6 Funciones nuevas y modificaciones en las funciones del firmware 4.6 SP6 Función SINAMICS G120 G120D Compatibilidad con el nuevo Power Module ✓ PM330 IP20 GX •... -
Página 387: Versión De Firmware 4.6
Anexo A.1 Funciones nuevas y ampliadas A.1.6 Versión de firmware 4.6 Tabla A- 7 Funciones nuevas y modificaciones en las funciones del firmware 4.6 Función SINAMICS G120 G120D Compatibilidad con el nuevo Power Module ✓ ✓ ✓ ✓ PM240-2 IP20 FSB … FSC •... -
Página 388: Interconexión De Señales En El Variador
Anexo A.2 Interconexión de señales en el variador Interconexión de señales en el variador A.2.1 Conceptos básicos El convertidor efectúa las funciones siguientes: ● Funciones de control y regulación ● Funciones de comunicación ● Funciones de diagnóstico y manejo Cada función está compuesta por uno o varios bloques interconectados. Figura A-1 Ejemplo de bloque: Potenciómetro motorizado (PMot) La mayoría de los bloques pueden adaptarse a la aplicación por medio de parámetros. -
Página 389: Binectores Y Conectores
Anexo A.2 Interconexión de señales en el variador Binectores y conectores Para el intercambio de señales entre los distintos bloques se utilizan conectores y binectores: ● Los conectores sirven para interconectar señales "analógicas" (p. ej., la velocidad de salida del PMot). ●... -
Página 390: Ejemplo De Aplicación
Anexo A.2 Interconexión de señales en el variador ¿Dónde puede consultarse información más detallada? ● Para asignar un significado diferente a las entradas digitales, es suficiente la información del presente manual. ● Las interconexiones de complejidad algo mayor están referenciadas en la lista de parámetros del Manual de listas. - Página 391 Anexo A.2 Interconexión de señales en el variador Parámetro Descripción p20033 = 440 Secuencia de ejecución del bloque lógico AND dentro del grupo de eje- cución 5 (procesamiento después del bloque temporizador) p20159 = 5000.00 Ajustar el retardo [ms] del bloque temporizador: 5 segundos p20158 = 722.0 Cablear el estado de DI 0 a la entrada del bloque temporizador r0722.0 = parámetro que indica el estado de la entrada digital 0...
-
Página 392: Pruebas De Recepción/Aceptación Para Las Funciones De Seguridad
Anexo A.3 Pruebas de recepción/aceptación para las funciones de seguridad Pruebas de recepción/aceptación para las funciones de seguridad A.3.1 Prueba de recepción recomendada Las siguientes descripciones sobre la prueba de recepción son recomendaciones para explicar lo esencial de la recepción. Puede desviarse de las recomendaciones si, una vez finalizada la puesta en marcha, comprueba lo siguiente: ●... -
Página 393: Prueba De Aceptación De Sto (Funciones Básicas)
Anexo A.3 Pruebas de recepción/aceptación para las funciones de seguridad A.3.2 Prueba de aceptación de STO (funciones básicas) Figura A-6 Prueba de aceptación de STO (funciones básicas) Procedimiento Para realizar una prueba de aceptación de la función STO como parte de las funciones básicas, haga lo siguiente: Estado El convertidor está... - Página 394 Anexo A.3 Pruebas de recepción/aceptación para las funciones de seguridad Estado Si se controla a través Si se controla a través Si se controla a través de PROFIsafe de entradas digitales de de los bornes STO_A y seguridad positiva (FDI) STO_B del Power Mo- dule PM240M El convertidor señala...
-
Página 395: Documentación De Máquinas
Anexo A.3 Pruebas de recepción/aceptación para las funciones de seguridad A.3.3 Documentación de máquinas Descripción de la máquina o planta Nombre Tipo Número de serie Fabricante Cliente final Esquema general del circuito de la máquina o instalación: Datos del convertidor Los datos del convertidor incluyen la versión de hardware de los convertidores relevantes para seguridad. -
Página 396: Certificados De Recepción
Anexo A.3 Pruebas de recepción/aceptación para las funciones de seguridad Modo de Dispositivo de seguridad Accionamien- Función de seguridad selec- Revisa- operación cionada Pulsador de parada de Cinta trans- emergencia activo portadora Certificados de recepción Nombres de archivo de los certificados de recepción Copia de seguridad Datos Medio de almacenamiento... -
Página 397: Certificado De Configuración Para Las Funciones Básicas, Firmware V4.4
Anexo A.3 Pruebas de recepción/aceptación para las funciones de seguridad A.3.4 Certificado de configuración para las funciones básicas, firmware V4.4 ... V4.7 Accionamiento = <pDO-NAME_v> Tabla A- 9 Versión de firmware Nombre Número Valor Control Unit Versión del firmware <r18_v> SI Versión Funciones de seguridad integradas en el accionamiento (procesador 1) r9770 <r9770_v>... -
Página 398: Compatibilidad Electromagnética
SI Control de cambios Etiqueta de fecha/hora r9782[1] <r9782[1]_v> Compatibilidad electromagnética Los accionamientos SINAMICS G110M se han probado de acuerdo con la norma de productos sobre CEM EN 61800-3:2004. Ver los detalles en la declaración de conformidad. Nota Instale todos los accionamientos de acuerdo con las directrices del fabricante y de acuerdo con las buenas prácticas de CEM. -
Página 399: Armónicos De Corriente
Anexo A.4 Compatibilidad electromagnética Tabla A- 15 Tensión de perturbaciones conducidas y emisiones radiadas Fenómeno CEM Tipo de variador Nivel conforme a Observación IEC 61800-3 Emisiones conducidas Todos los variadores con filtros de clase A integrados. Categoría C2 (tensión de perturba- Primer entorno, uso Referencia: ción) -
Página 400: Inmunidad Cem
Anexo A.4 Compatibilidad electromagnética Inmunidad CEM Los accionamientos SINAMICS G110M se han probado de acuerdo con los requisitos de inmunidad del entorno (industrial) de categoría C3: Tabla A- 17 Inmunidad CEM Fenómeno CEM Estándar Nivel Criterio de rendimiento Descarga electrostática (ESD) -
Página 401: Manuales Y Asistencia Técnica
● Manual de funciones de bus de campo (https://support.industry.siemens.com/cs/ww/es/view/109477369) Configuración de buses de campo ● Manual de listas (https://support.industry.siemens.com/cs/ww/es/view/109478707) Listas de parámetros, alarmas y fallos. Diagramas gráficos de función ● Instrucciones de servicio del IOP (https://support.industry.siemens.com/cs/ww/es/view/109478559) Manejo del Operator Panel, montaje del juego para montar en puerta para IOP. -
Página 402: Configurar Un Manual
Ayuda a la configuración Catálogo Datos de pedido e información técnica para los convertidores SINAMICS G. Catálogos para descargar o catálogo online (Industry Mall): Todo sobre SINAMICS G110M (www.siemens.com/sinamics-g110m) Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI... -
Página 403: Soporte De Producto
Resumen técnico sobre compatibilidad electromagnética (CEM) Directivas y normas, construcción de armarios eléctrico según las reglas de CEM Sinopsis de CEM (https://support.industry.siemens.com/cs/ww/es/view/103704610) Manual de configuración Directiva de montaje CEM Construcción del armario eléctrico, conexión equipotencial y tendido de cables conforme a las reglas de CEM Directrices de compatibilidad electromagnética... - Página 404 Anexo A.5 Manuales y asistencia técnica En esta URL encontrará lo siguiente: ● Información actual sobre productos (notificaciones sobre productos) ● FAQ (preguntas frecuentes) ● Descargas ● El newsletter contiene la información más reciente sobre nuestros productos. ● El Knowledge Manager (búsqueda inteligente) sirve para localizar documentos. ●...
-
Página 405: Índice Alfabético
Índice alfabético otros, 253 parabólica, 253 Característica a 87 Hz, 78, 78 Característica cuadrática, 253 Acondicionamiento de consigna, 237 Característica lineal, 253 Actualización del firmware, 359 Característica parabólica, 253 Agua, 371 Característica U/f, 251 Ajustes de fábrica, 137 Carga, 314 restablecer, 137, 138, 140 Caso de fallo, 338 Alarma, 333... - Página 406 Índice alfabético Conexión en triángulo, 77 Elevación de la tensión, 251, 255 Conexión en triángulo (Δ), 108 Elevadores, 134 Conmutación de juegos de datos, 221 Emisiones CEM, 396 Contaminación atmosférica, 371 EN 61800-5-2, 211 Contraseña, 213 Encadenada, 79 Control de accionamiento, 141 Enclavamiento, 388 Control del motor, 154 Entrada analógica...
- Página 407 Índice alfabético Funciones de protección, 143 Fusible, 78 Fusibles homologados UL, 369, 369, 369, 369 AS-i, 329 BF, 328, 329 LNK, 329 RDY, 328 Generador de rampa, 237, 242 SAFE, 328 Getting Started (primeros pasos), 399 Licencia, 309 Giro antihorario, 154 Listo para conexión, 145 Giro horario, 154 Listo para servicio, 145...
- Página 408 Índice alfabético Rango de humedad, 371 Rango de temperatura, 368 Optimizar el regulador de velocidad, 259 Rangos de potencia, 368 Orden de conexión (ON), 154 RDY (Ready), 328 Orden OFF1, 154 Rebote de contactos, 217 Recepción, 222 completa, 222 reducida, 224 p0015, macro configurar interfaces, 81 Rectificadora, 276 p15 macro, 105...
- Página 409 Índice alfabético SD (tarjeta de memoria), 308 Temperatura ambiente, 108, 291 formatear, 308 Temperatura de almacenamiento, 368 MMC, 308 Tensión de funcionamiento, 368 Secuenciador, 145 Tensión del circuito intermedio, 292 Sensor de temperatura, 82 Termostato, 286 Sensor de temperatura del motor, 82, 288 Termostato bimetal, 286 Sensor de temperatura KTY 84, 286 Test de luz/sombra, 217...
- Página 410 Índice alfabético Vigilancia de temperatura, 283 Vigilancia I2t, 283 Vista general de estados, 145 ZSW1 (palabra de estado 1), 166 ZSW3 (palabra de estado 3), 168 Variador distribuido para motorreductores SIMOGEAR Instrucciones de servicio, 04/2018, FW V4.7 SP10, A5E31298649E AI...