Tabla de contenido
Publicidad
Enlaces rápidos
Margin
Titelseite OHNE Beschnitt in RGB
blue dark 100 % Stone gray 100%
Edición
08/2020
1/20x
Siemens Sans, Bold
11/9/7,5 pt, white
Absatzformat: 05 Ausgabe
Alle Schriften sind als Absatzformat hinterlegt!!!
wenn möglich in gleicher Schriftgruppe
System
Produktgruppe
Titel
Dokuklasse
URL
Ausgabe
1/10x
1/14x
1/10x
Instrucciones de servicio
SIMOTICS
Motores torque completos
SIMOTICS-T 1FW3
1/5x
1/28x
1/20x
1/20x
1/10x
Bufferzone
groß
mittel
klein
36
30
26
18
16
14
13
12
11
11
12
13
9
9
9
11
9
7,5
1 x
Siemens Sans, Bold,
11/12/13 pt, white
Absatzformat: 04 Dokuklasse
Siemens Sans, Bold,
9 pt, black
Absatzformat: 06 URL
2 x
Margin
Wird mehr Text verwendet
Verlaufsfeld nach oben
erweitern. Abstände von
Rand zu Text einhalten!
1/5x
1/10x
Siemens Sans, Roman,
36/30/26 pt, white
Absatzformat: 01 System
Siemens Sans, Bold
18/16/14 pt, white
Absatzformat: 02 Produkt
Siemens Sans, Roman,
13/12/11 pt, white
Absatzformat: 03 Titel
1/5x
1/28x
1/20x
www.siemens.com
1/20x
Publicidad
Tabla de contenido

Manuales relacionados para Siemens SIMOTICS-T 1FW3













Resumen de contenidos para Siemens SIMOTICS-T 1FW3
- Página 1 Produktgruppe Titel Dokuklasse Ausgabe Wird mehr Text verwendet Verlaufsfeld nach oben erweitern. Abstände von Rand zu Text einhalten! 1/10x Siemens Sans, Bold, 11/12/13 pt, white Absatzformat: 04 Dokuklasse 1/14x 1/5x 1/10x 1/10x Siemens Sans, Roman, Instrucciones de servicio 36/30/26 pt, white...
- Página 3 Introducción Consignas básicas de seguridad SIMOTICS Descripción Preparaciones de uso Drive Technology Motores torque completos 1FW3 Montaje Conexión Instrucciones de servicio Puesta en marcha Funcionamiento Mantenimiento Retirada del servicio y eliminación Anexo 08/2020 A5E46027719E AA...
-
Página 4: Personal Cualificado
Considere lo siguiente: ADVERTENCIA Los productos de Siemens sólo deberán usarse para los casos de aplicación previstos en el catálogo y la documentación técnica asociada. De usarse productos y componentes de terceros, éstos deberán haber sido recomendados u homologados por Siemens. El funcionamiento correcto y seguro de los productos exige que su transporte, almacenamiento, instalación, montaje, manejo y mantenimiento hayan sido realizados de forma... -
Página 5: Introducción
Lea estas instrucciones de servicio antes de empezar a utilizar el motor para garantizar un funcionamiento seguro y sin problemas, y para maximizar la vida útil. Siemens se esfuerza continuamente para mejorar la calidad de la información proporcionada en estas instrucciones de servicio. -
Página 6: Grupo Objetivo
Siemens no controla la información de dichos sitios web ni tampoco es responsable del contenido y la información que en ellos se proporcionan. -
Página 7: Tabla De Contenido
Índice Introducción............................3 Consignas básicas de seguridad ......................9 Consignas generales de seguridad ..................9 Daños en el equipo por campos eléctricos o descarga electrostática ........13 Información de seguridad ....................14 Riesgos residuales de sistemas de accionamiento (Power Drive Systems) ......15 Descripción ............................ - Página 8 Evitar sistemas de cojinetes sobredeterminados ..............77 Montaje de la carcasa del motor ..................78 Montaje insertable ......................80 4.4.1 Brazo de reacción Siemens ....................81 4.4.2 Elemento de amarre en el lado del eje ................90 4.4.2.1 Eje insertable con opción +Q30 ..................93 4.4.2.2...
- Página 9 Índice 5.12 Conexión del sensor de temperatura en motores sin DRIVE-CLiQ ........136 5.13 Conexión de sensores de temperatura ................136 5.14 Tendido de cables en entornos húmedos ................139 5.15 Apantallado, puesta a tierra y conexión equipotencial ............140 Puesta en marcha ..........................
- Página 10 Índice Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 11: Consignas Básicas De Seguridad
Consignas básicas de seguridad Consignas generales de seguridad ADVERTENCIA Descarga eléctrica y peligro de muerte por otras fuentes de energía Tocar piezas que están bajo tensión puede provocar lesiones graves o incluso la muerte. • Trabaje con equipos eléctricos solo si tiene la cualificación para ello. •... - Página 12 Consignas básicas de seguridad 1.1 Consignas generales de seguridad ADVERTENCIA Descarga eléctrica por motores o equipos dañados El manejo inadecuado de motores o equipos puede provocar daños en estos. En los motores o equipos dañados pueden darse tensiones peligrosas en la caja o en los componentes al descubierto.
- Página 13 • Desconecte los equipos radioeléctricos o teléfonos móviles cuando se acerque a menos de 20 cm de los componentes. • Utilice la "App de SIEMENS Industry Online Support" solo si está desconectado el equipo. ADVERTENCIA Peligros desconocidos por ausencia o ilegibilidad de los rótulos de advertencia La ausencia o ilegibilidad de los rótulos de advertencia pueden provocar peligros...
-
Página 14: Incendio Por Refrigeración Insuficiente
Consignas básicas de seguridad 1.1 Consignas generales de seguridad Nota Consignas de seguridad importantes para las funciones Safety Integrated Si desea utilizar las funciones Safety Integrated, observe las consignas de seguridad de los manuales Safety Integrated. ADVERTENCIA Perturbaciones en implantes activos por campos electromagnéticos Las instalaciones eléctricas de fuerza, p. -
Página 15: Daños En El Equipo Por Campos Eléctricos O Descarga Electrostática
Consignas básicas de seguridad 1.2 Daños en el equipo por campos eléctricos o descarga electrostática ADVERTENCIA Incendio por funcionamiento inadecuado del motor Cuando el funcionamiento es inadecuado, si se da un fallo, el motor puede sobrecalentarse y provocar un incendio con formación de humo que puede ocasionar lesiones graves o incluso la muerte. -
Página 16: Información De Seguridad
(https://www.siemens.com/industrialsecurity). Los productos y las soluciones de Siemens están sometidos a un desarrollo constante con el fin de hacerlos más seguros. Siemens recomienda expresamente realizar actualizaciones en cuanto estén disponibles y utilizar únicamente las últimas versiones de los productos. El uso de versiones de los productos anteriores o que ya no sean soportadas y la falta de aplicación... -
Página 17: Riesgos Residuales De Sistemas De Accionamiento (Power Drive Systems)
Consignas básicas de seguridad 1.4 Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Durante la evaluación de riesgos de la máquina que exige la normativa local (p. ej., Directiva de máquinas CE), el fabricante de la máquina o el instalador de la planta deben tener en cuenta los siguientes riesgos residuales derivados de los componentes de control y accionamiento de un sistema de accionamiento: 1. - Página 18 Consignas básicas de seguridad 1.4 Riesgos residuales de sistemas de accionamiento (Power Drive Systems) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 19: Descripción
Descripción Descripción general de los motores torque completos SIMOTICS T-1FW3 estándar La serie 1FW3 se desarrolló para accionamientos directos. El accionamiento directo es una unidad de accionamiento compacta en la que la potencia mecánica del motor se transfiere directamente a la máquina accionada sin ningún elemento mecánico de transmisión. Los motores torque completos 1FW3 son motores síncronos excitados por imanes permanentes, con alto número de polos (lentos) y refrigerados por agua. -
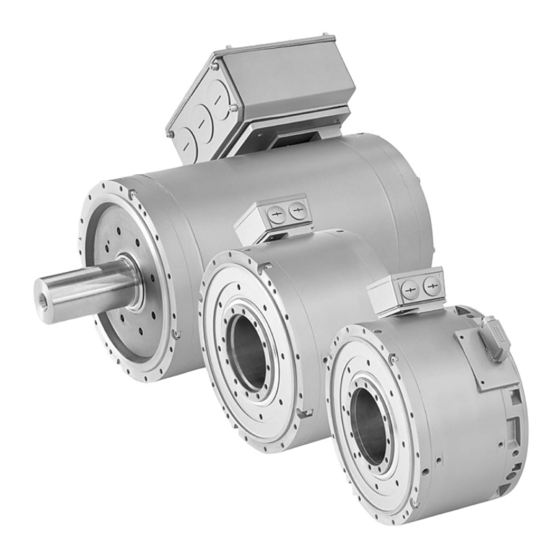
Página 20: Descripción General De La Versión Heavy Duty Especial, Opción L03
Figura 2-1 Motor torque Heavy Duty 1FW3 completo Con el motor torque Heavy Duty 1FW3 completo, Siemens ofrece un accionamiento directo para satisfacer los requisitos siguientes. Por un lado, el potente motor síncrono de imanes permanentes se caracteriza por una precisión y una respuesta dinámica elevadas. -
Página 21: Fácil Integración
Descripción Fácil integración • en el sistema mecánico • en el sistema de accionamiento SINAMICS S120 (interfaz DRIVE-CLiQ) Motor torque Heavy Duty 1FW3 completo: breve resumen de la tecnología Velocidad nominal:* Hasta 800 rpm (velocidad máxima hasta 1380 rpm) Par nominal:* Hasta 7000 Nm (par máximo hasta 11400 Nm) * Según la versión y el tipo Motor torque Heavy Duty 1FW3 completo: aplicaciones típicas... -
Página 22: Utilización Para La Finalidad Prevista
En su caso, tenga en cuenta las desviaciones con respecto a las homologaciones o las disposiciones legales de cada país. • En caso de dudas acerca del uso correcto, consulte a la oficina local de Siemens. • Si desea utilizar versiones especiales o de diseño cuyos detalles técnicos no coincidan con los de los motores aquí... -
Página 23: Características Técnicas Y Condiciones Ambientales
Descripción 2.2 Características técnicas y condiciones ambientales ADVERTENCIA Lesiones y daños materiales si no se observa la Directiva de Máquinas 2006/42/CE Existe peligro de muerte, lesiones graves o daños materiales si no se observa cuidadosamente la Directiva de Máquinas 2006/42/CE. •... -
Página 24: Directivas Pertinentes
(CCC). Certificación CCC negativa: Certificación de producto CCC (https://support.industry.siemens.com/cs/products?search=CCC&dtp=Certificate&mfn=ps&o= DefaultRankingDesc&pnid=13347&lc) RoHS de China Los motores SIMOTICS cumplen la RoHS de China. Puede encontrar información adicional en: RoHS de China (https://support.industry.siemens.com/cs/ww/en/view/109738656) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA... -
Página 25: Underwriters Laboratories
Sistemas de calidad Siemens AG utiliza un sistema de gestión de la calidad que cumple los requisitos de las normas ISO 9001 e ISO 14001. En el enlace siguiente de Internet se pueden descargar los certificados para los motores... -
Página 26: Planos Acotados
(intervalo de cambio de coji- netes = 20000 h) • Se puede seleccionar DE sin cojinete Conjunto de montaje • Brazo de reacción Siemens • Elementos de amarre Sistemas de encóder integrados para moto- • Encóder incremental sen/cos 1 V , 2048 S/R con pistas C y D, encóder... -
Página 27: Condiciones Ambientales
Descripción 2.3 Factores de reducción de valores nominales 2.2.3 Condiciones ambientales Nota Ubicaciones de instalación inadecuadas Los motores no son adecuados para usarlos • en atmósferas salinas o corrosivas • en exteriores Los motores están previstos para el funcionamiento en zonas cubiertas, como instalaciones de producción. -
Página 28: Datos De La Placa De Características
Descripción 2.4 Datos de la placa de características Datos de la placa de características La placa de características contiene los datos técnicos del motor. Tabla 2- 4 Descripción de los datos de la placa de características Posición Descripción/especificaciones técnicas Tipo de motor: Motor síncrono, motor torque completo, referencia Información adicional Tipo constructivo Par a rotor parado [Nm]... -
Página 29: Diseño
Descripción 2.5 Diseño Diseño 2.5.1 Protección térmica del motor ATENCIÓN Daños térmicos en el motor Si el motor se sobrecalienta, los devanados y los cojinetes pueden destruirse. Además, el sobrecalentamiento de un motor puede provocar la desmagnetización de los imanes permanentes. - Página 30 Descripción 2.5 Diseño Reserva con conexión enchufable en los tubos aislantes Reserva Sensor de temperatura conectado Figura 2-3 Ejemplo: Conexión en la caja de bornes Se integran dos tipos de sensores de temperatura: KTY 84 Pt1000 Los sensores de temperatura KTY 84 son componentes Los sensores de temperatura Pt1000 no son componentes ESD.
- Página 31 Descripción 2.5 Diseño Figura 2-4 Comparación de los sensores de temperatura KTY 84-130 y Pt1000 Es posible evaluar externamente la señal de preadvertencia del circuito de evaluación en el convertidor de accionamiento SINAMICS. Encontrará la designación de la interfaz para conectar los sensores de temperatura en el capítulo "Conexión de sensores de temperatura (Página 136)".
-
Página 32: Termistor Ptc (Opción)
ADVERTENCIA Movimiento incontrolado del motor a consecuencia de un ajuste incorrecto Los encóders se ajustan en fábrica para convertidores de accionamiento SIEMENS. Al operar el motor con un convertidor de otro fabricante, puede ser necesario otro ajuste del encóder. El ajuste incorrecto del encóder respecto a la FEM del motor puede provocar movimientos incontrolados que pueden llegar a causar lesiones o daños materiales. -
Página 33: Selección De Encóders E Identificación En La Referencia
Motion Control, con y sin interfaz DRIVE-CLiQ. Además, en esta lista se indican los sistemas de medición y encóders particulares que se puede usar con Safety Integrated: Encóders de seguridad (https://support.industry.siemens.com/cs/ww/en/view/33512621) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA... -
Página 34: Conexión De Encóder Para Motores Con Interfaz Drive-Cliq
• Usar solo la placa electrónica de tipo y el encóder DRIVE-CLiQ para el motor original. • No montar el encóder DRIVE-CLiQ en otros motores. • No sustituir un encóder DRIVE-CLiQ por un encóder DRIVE-CLiQ de otro motor. • Solo debería sustituir encóders DRIVE-CLiQ el personal de servicio técnico de Siemens especialmente formado. ATENCIÓN Daños en componentes sensibles a las descargas electrostáticas... -
Página 35: Conexión De Encóder Para Motores Sin Interfaz Drive-Cliq
Descripción 2.5 Diseño 2.5.2.2 Conexión de encóder para motores sin interfaz DRIVE-CLiQ En caso de motores sin una interfaz DRIVE-CLiQ integrada, la señal analógica del encóder se convierte en una señal digital dentro del sistema de accionamiento. Para esos motores y también para encóders externos, las señales de encóder deben conectarse a SINAMICS S120 por Sensor Modules. -
Página 36: Asignación De Pines Para Conector De Señal De 17 Pines
Descripción 2.5 Diseño 360° = 360° / 2048 eléctricos mecánicos 90° eléctricos 45° eléctricos 180° +/- 90° eléctricos eléctricos 360° = 360° eléctricos mecánicos Figura 2-5 Secuencia y asignación de señales para encóder IC2048S/R sin interfaz DRIVE-CLiQ para un sentido de giro positivo Asignación de pines para conector de señal de 17 pines N.º... -
Página 37: Encóders Absolutos
Descripción 2.5 Diseño Cables Tabla 2- 10 Cable preconfeccionado 6FX ③ 002 - 2CA31 - ☐☐☐ ③ ☐☐☐ ③ Longitud 5 MOTION- CONNECTⓇ500 Long. cable máx. 100 m 8 MOTION- CONNECTⓇ800 Contraconector: 6FX2003-0SU17 (conector hembra) Consulte otros datos técnicos y códigos de longitud en el catálogo D21.4, capítulo "Sistema de conexión MOTION-CONNECT". - Página 38 Descripción 2.5 Diseño Tabla 2- 11 Especificaciones técnicas, encóder absoluto Tipo de encóder 9.º dígito de la Tensión de Consumo de Resolución Rango de Pista A-B: resolu- Error referencia funciona- corriente absoluta despla- ción incremental angular miento máx. (monovuelta) zamiento (periodos sen/cos (multi- por revolución)
-
Página 39: Resólver Multipolar
Descripción 2.5 Diseño 2.5.2.5 Resólver multipolar Descripción El número de periodos de seno y coseno por revolución se corresponde con el número de pares de polo del resólver. Los resólvers pueden detectar movimientos relativos. Se puede determinar la posición absoluta dentro de un periodo de señal de salida de resólver. Función y datos técnicos •... - Página 40 Descripción 2.5 Diseño Asignación de pines para conector hembra con brida de 12 pines con contactos de pin Tabla 2- 15 Asignación de pines, conector hembra con brida de 12 pines N.º pin Señal Fig. Sin conexión Sin conexión Sin conexión Sin conexión +1R1 (KTY 84) o 1R1 (Pt1000) –1R2 (KTY 84) o 1R2 (Pt1000)
-
Página 41: Encóder Con Transmisión Por Correa
Descripción 2.5 Diseño 2.5.2.6 Encóder con transmisión por correa Dentro de la caja de encóder (a un lado del estátor) hay un encóder acoplado por una correa. De esta forma, por ejemplo, se puede utilizar el eje hueco para pasar fluidos. Consulte la relación de transmisión en la tabla "Relación de transmisión"... -
Página 42: Montaje Coaxial De Encóder
Descripción 2.5 Diseño 2.5.2.7 Montaje coaxial de encóder Para la mayor precisión y los más elevados requisitos dinámicos, se dispone de montaje coaxial de encóder. Se puede sustituir fácilmente el módulo de encóder sin necesidad de reajustes. Encontrará más información en el capítulo "Sustitución de un encóder (Página 159)". Figura 2-7 1FW3 con montaje coaxial de encóder 2.5.2.8... -
Página 43: Conexión Equipotencial
Descripción 2.5 Diseño Conexión equipotencial ADVERTENCIA Descarga eléctrica a consecuencia del tendido incorrecto de las tuberías de agua de refrigeración En caso de que haya tuberías de agua de refrigeración conductoras de la electricidad que entren en contacto con piezas bajo tensión, se puede producir una descarga eléctrica que cause muertes o lesiones graves. - Página 44 Descripción 2.5 Diseño Notas sobre la preparación del circuito de refrigeración • Utilice tuberías y accesorios de latón, acero inoxidable o plástico. No se permiten tuberías ni accesorios galvanizados. Nota Si utiliza varios materiales en el circuito de refrigeración, considere las series electroquímicas.
- Página 45 Nota Temperatura de entrada del agua de refrigeración >45 °C Póngase en contacto con la oficina local de Siemens si la temperatura de entrada del agua de refrigeración >45 °C. Para responder a su consulta acerca de la reducción de valores nominales debida al aumento de la temperatura ambiente, se necesitan los datos siguientes: •...
-
Página 46: Especificaciones Del Refrigerante
Descripción 2.5 Diseño Especificaciones del refrigerante Utilice como refrigerante solamente agua que cumpla las "Especificaciones del agua refrigerante". Nota Utilice agua desionizada con conductividad reducida (de 5 a 10 μS/cm) como refrigerante. Tabla 2- 20 Especificaciones del agua refrigerante Calidad del agua utilizada como refrigerante para motores con tubos de acero inoxidable o aluminio + cubierta de fundición gris o acero Iones de cloruro... -
Página 47: Potencias De Refrigeración A Disipar Y Caudal De Refrigerante
Descripción 2.5 Diseño Biocida Nota Compatibilidad de aditivos del refrigerante El biocida y Antifrogen N no deben mezclarse. Potencias de refrigeración a disipar y caudal de refrigerante Los valores especificados en la tabla "Potencia de refrigeración para disipar" son para una temperatura del agua de refrigeración de +30 °C y servicio S1. - Página 48 Descripción 2.5 Diseño Figura 2-8 Caudal para SH 150 Figura 2-9 Caudal para SH 200 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 49: Evite La Entrada Adicional De Calor
Descripción 2.5 Diseño Figura 2-10 Caudal para SH 280 Volumen de refrigerante del motor Tabla 2- 22 Volumen de refrigerante del motor Longitud (7.º dígito Volumen de refrigerante del motor (litros) de la referencia) 1FW315 1FW320 1FW328 Eje hueco Eje insertable Eje macizo 0,23 0,11... -
Página 50: Resistencias De Frenado (Frenado Por Cortocircuito Del Rotor)
Descripción 2.5 Diseño 2.5.4 Resistencias de frenado (frenado por cortocircuito del rotor) Descripción de la función En los convertidores PWM con transistores, cuando se sobrepasan los valores de tensión del circuito intermedio o falla la electrónica, deja de ser posible el frenado eléctrico. Si la deriva del accionamiento hasta la parada puede ser un peligro potencial, es posible frenar el motor cortocircuitando el rotor. -
Página 51: Propiedades Mecánicas De Los Motores
Descripción 2.5 Diseño 2.5.5 Propiedades mecánicas de los motores 2.5.5.1 Versiones de eje y extremo de eje El motor torque completo 1FW3 puede pedirse en 3 versiones de eje distintas: • Eje hueco • Eje insertable • Eje macizo El extremo de eje en DE es cilíndrico según DIN 748-3 (IEC 60072-1). Tabla 2- 23 Eje hueco Tamaño... -
Página 52: Grado De Protección
Descripción 2.5 Diseño 2.5.5.2 Grado de protección El grado de protección se define en conformidad con EN 60034-5 (IEC 60034-5) (p. ej., IP65). En la placa de características se indica el grado de protección. La combinación de letras o números significa lo siguiente: •... -
Página 53: Fuerzas Radiales Y Axiales
Descripción 2.5 Diseño 2.5.5.4 Fuerzas radiales y axiales Punto de aplicación de fuerzas radiales F en el motor torque • Para velocidades de funcionamiento promedio • Para un intervalo nominal de cambio de cojinetes de 20000 h 1 Motor torque completo 2 Eje Cota X en mm: Distancia entre el punto de aplicación de la fuerza F y el resalte del eje del motor tor-... -
Página 54: Eje Hueco
Descripción 2.5 Diseño Nota Tipo constructivo de cojinete y validez de gráfica de fuerza axial Al usar la gráfica de fuerza axial, respete la fuerza radial máxima admisible. La gráfica de fuerza axial es válida para x < 100 mm. Al dimensionar el cojinete, se debe redondear la velocidad de funcionamiento del motor a la curva de velocidad inmediatamente superior. - Página 55 Descripción 2.5 Diseño Gráfica de fuerza axial para 1FW315❑ eje hueco Figura 2-14 Fuerza axial admisible en función de fuerza radial para 1FW315❑ Gráfica de fuerza radial para 1FW320❑ eje hueco Figura 2-15 Gráfica de fuerza radial para 1FW320❑, con intervalo nominal de cambio de cojinetes de 20000 h Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 56 Descripción 2.5 Diseño Gráfica de fuerza axial para 1FW320❑ eje hueco Figura 2-16 Fuerza axial admisible en función de fuerza radial para 1FW320❑ Gráfica de fuerza radial para 1FW328❑ eje hueco Figura 2-17 Gráfica de fuerza radial para 1FW328❑, con intervalo nominal de cambio de cojinetes de 20000 h Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 57 Nota Utilización de un brazo de reacción En los montajes insertables (montaje en eje) recomendamos utilizar un brazo de reacción Siemens (véase el capítulo "Brazo de reacción Siemens (Página 81)"). Gráfica de fuerza radial para 1FW315❑ eje insertable Figura 2-19 Gráfica de fuerza radial para 1FW315❑, con intervalo nominal de cambio de cojinetes de...
- Página 58 Descripción 2.5 Diseño Gráfica de fuerza axial para 1FW315❑ eje insertable Figura 2-20 Fuerza axial admisible en función de fuerza radial para 1FW315❑ (20000 h) Gráfica de fuerza radial para 1FW315❑ eje insertable Figura 2-21 Gráfica de fuerza radial para 1FW315❑, con intervalo nominal de cambio de cojinetes de 60000 h Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 59 Descripción 2.5 Diseño Gráfica de fuerza axial para 1FW315❑ eje insertable Figura 2-22 Fuerza axial admisible en función de fuerza radial para 1FW315❑ (60000 h) Gráfica de fuerza radial para 1FW320❑ eje insertable Figura 2-23 Gráfica de fuerza radial para 1FW320❑, con intervalo nominal de cambio de cojinetes de 20000 h Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 60 Descripción 2.5 Diseño Gráfica de fuerza axial para 1FW320❑ eje insertable Figura 2-24 Fuerza axial admisible en función de fuerza radial para 1FW320❑ (20000 h) Gráfica de fuerza radial para 1FW320❑ eje insertable Figura 2-25 Gráfica de fuerza radial para 1FW320❑, con intervalo nominal de cambio de cojinetes de 60000 h Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 61 Descripción 2.5 Diseño Gráfica de fuerza axial para 1FW320❑ eje insertable Figura 2-26 Fuerza axial admisible en función de fuerza radial para 1FW320❑ (60000 h) Para motores 1FW328❑ eje insertable Nota Los motores 1FW328 con eje insertable (tipo constructivo montado en eje) deben montarse usando un brazo de reacción Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 62 Descripción 2.5 Diseño Eje macizo Gráfica de fuerza radial para 1FW315❑ eje macizo Figura 2-27 Gráfica de fuerza radial para 1FW315❑, con intervalo nominal de cambio de cojinetes de 20000 h Gráfica de fuerza axial para 1FW315❑ eje macizo Figura 2-28 Fuerza axial admisible en función de fuerza radial para 1FW315❑...
- Página 63 Descripción 2.5 Diseño Gráfica de fuerza radial para 1FW315❑ eje macizo Figura 2-29 Gráfica de fuerza radial para 1FW315❑, con intervalo nominal de cambio de cojinetes de 60000 h Gráfica de fuerza axial para 1FW315❑ eje macizo Figura 2-30 Fuerza axial admisible en función de fuerza radial para 1FW315❑ (60000 h) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 64 Descripción 2.5 Diseño Gráfica de fuerza radial para 1FW320❑ eje macizo Figura 2-31 Gráfica de fuerza radial para 1FW320❑, con intervalo nominal de cambio de cojinetes de 20000 h Gráfica de fuerza axial para 1FW320❑ eje macizo Figura 2-32 Fuerza axial admisible en función de fuerza radial para 1FW320❑ (20000 h) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 65 Descripción 2.5 Diseño Gráfica de fuerza radial para 1FW320❑ eje macizo Figura 2-33 Gráfica de fuerza radial para 1FW320❑, con intervalo nominal de cambio de cojinetes de 60000 h Gráfica de fuerza axial para 1FW320❑ eje macizo Figura 2-34 Fuerza axial admisible en función de fuerza radial para 1FW320❑ (60000 h) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 66 Descripción 2.5 Diseño Gráfica de fuerza radial para 1FW328❑ eje macizo Figura 2-35 Gráfica de fuerza radial para 1FW328❑, con intervalo nominal de cambio de cojinetes de 40000 h Gráfica de fuerza axial para 1FW328❑ eje macizo Figura 2-36 Fuerza axial admisible en función de fuerza radial para 1FW328❑ (40000 h) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 67: Equilibrado
Descripción 2.5 Diseño 2.5.5.5 Equilibrado Requisitos del proceso de equilibrado de componentes montados Los motores con eje hueco o eje insertable deben equilibrarse en fábrica sin ningún componente montado. Los motores con eje macizo se equilibran en conformidad con DIN ISO 21940-32. -
Página 68: Vigilancia De Componentes De Accionamiento Con Señales De Vibración
Los motores preparados para la supervisión de estado cuentan con orificios para insertar sensores de vibración. Esto permite colocar sensores de vibración de forma óptima e instalar sistemas de supervisión de estado. Puede encontrar información adicional sobre el sistema de supervisión de estado de Siemens en este enlace: SIPLUS CMS (https://new.siemens.com/global/en/products/automation/products-for-specific-... -
Página 69: Emisión De Ruidos
Descripción 2.5 Diseño 2.5.5.7 Emisión de ruidos Los motores de la serie 1FW3 pueden alcanzar durante el funcionamiento los siguientes niveles de presión acústica superficial Lp(A): Máx. 73 dB(A) a la frecuencia de pulsación nominal de 4 kHz y en el punto de funcionamiento nominal Nota Nivel de presión acústica al reducir la frecuencia de pulsación... - Página 70 Descripción 2.5 Diseño Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 71: Preparaciones De Uso
Nota Siemens no aceptará ninguna reclamación por artículos incorrectos o no incluidos que se presente en una fecha posterior. • Presente inmediatamente al transportista una reclamación si detecta algún tipo de daño de transporte. -
Página 72: Alcance De Suministro
Preparaciones de uso 3.2 Transporte y almacenamiento Alcance de suministro El alcance de suministro contiene lo siguiente: • Motor (en las alturas de eje 1FW315x, 1FW320x o 1FW328x suministrables) • Placa de características (placa de tipo) • Esquema eléctrico • Información de seguridad y folleto de instrucciones El folleto de instrucciones contiene la URL para la descarga de las instrucciones de servicio. - Página 73 Preparaciones de uso 3.2 Transporte y almacenamiento Figura 3-1 Elevación y transporte del motor con balancín Si el motor no se pone en marcha inmediatamente después de la entrega, deberá almacenarse en un lugar seco, sin polvo ni vibraciones (vea el capítulo "Almacenamiento (Página 72)").
-
Página 74: Almacenamiento
Preparaciones de uso 3.2 Transporte y almacenamiento 3.2.2 Almacenamiento Nota Sustitución de los rodamientos de rodillos • Incluso en condiciones favorables (es decir, en un espacio seco, sin polvo y sin vibraciones), si el motor ha estado almacenado durante más de tres años, deben cambiarse los cojinetes. -
Página 75: Almacenamiento Prolongado
Preparaciones de uso 3.2 Transporte y almacenamiento Almacenamiento prolongado Nota Tiempo de almacenamiento máximo de hasta dos años El tiempo de almacenamiento afecta a las propiedades de la grasa de los rodamientos de rodillos. • Almacene el motor durante un máximo de dos años a una temperatura de entre 5 °C y 40 °C. - Página 76 Preparaciones de uso 3.2 Transporte y almacenamiento Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 77: Montaje
Montaje Notas de seguridad para el montaje mecánico ADVERTENCIA Peligro de muerte a causa de campos de imanes permanentes Los rotores de los motores torque están dotados de imanes permanentes de gran potencia. Por ello, con el motor abierto se producen campos magnéticos intensos y altas fuerzas de atracción. - Página 78 Montaje 4.1 Notas de seguridad para el montaje mecánico ADVERTENCIA Peligro de muerte debido a descarga eléctrica Debido a los imanes permanentes del rotor, cuando los motores giran se induce una tensión. Si se utilizan conexiones para cables defectuosas, se puede sufrir una descarga eléctrica.
-
Página 79: Evitar Sistemas De Cojinetes Sobredeterminados
Montaje 4.2 Evitar sistemas de cojinetes sobredeterminados Evitar sistemas de cojinetes sobredeterminados Los motores torque están equipados como motores completos con rodamientos rígidos de bolas. ATENCIÓN Daños en los cojinetes del motor por sobredeterminación de cojinetes de eje Un sistema sobredeterminado de cojinetes puede causar daños inmediatos en los cojinetes o reducir drásticamente el intervalo de cambio de cojinetes. -
Página 80: 4.3 Montaje De La Carcasa Del Motor
Montaje 4.3 Montaje de la carcasa del motor Montaje de la carcasa del motor Montaje de la carcasa del motor en la máquina del cliente Se puede montar la carcasa del motor torque 1FW3 completo en la máquina del cliente de acuerdo con esta tabla: Tabla 4- 1 Tipos de construcción... -
Página 81: Unión Del Rotor Al Eje De Accionamiento
Montaje 4.3 Montaje de la carcasa del motor Unión del rotor al eje de accionamiento Se puede unir el rotor del motor 1FW3 motor al eje de accionamiento del cliente bien con una brida, bien con un elemento de amarre: Altura del eje Orificios roscados en DE del rotor (lado frontal) Elementos de amarre en el diámetro interior del rotor... -
Página 82: Montaje Insertable
Montaje 4.4 Montaje insertable Montaje insertable Figura 4-2 Desacoplamiento del estátor de la bancada de máquina con un brazo de reacción (representación esquemática) En el montaje en eje, el peso del motor se apoya totalmente en la extensión del eje de la máquina accionada. -
Página 83: Brazo De Reacción Siemens
Siemens. • Los brazos de reacción Siemens permiten montar el motor en vertical. Al montar los brazos de reacción debe asegurarse que no haya deformaciones ni distorsiones axiales. -
Página 84: Influencia Del Brazo De Reacción Sobre El Lazo De Regulación De Velocidad
Siemens. El oscilador de dos masas compuesto por motor y carga sigue dominando la respuesta del sistema, pero el acoplamiento del estátor por el brazo de reacción Siemens se manifiesta en forma de efectos de resonancia adicionales que debe amortiguar la regulación en lazo cerrado. - Página 85 Montaje 4.4 Montaje insertable Proceso de montaje, brazo de reacción Siemens con elemento de amarre Procedimiento 1. Comprobar el rotor y preparar los asientos de eje: Asiento de amarre: debe estar libre de cualquier lubricante. Asiento de centraje: aplicar pasta de montaje, p. ej., Molykote...
- Página 86 Montaje 4.4 Montaje insertable 2. Deslice axialmente el motor sobre la brida del cliente: • El motor se desliza sobre la extensión del eje y se encuentra en la posición axial correcta cuando el brazo de reacción descansa en la brida del lado de la máquina. El motor no se posiciona axialmente en el lado del eje.
- Página 87 Montaje 4.4 Montaje insertable 3 accesos para apretar los tornillos Figura 4-7 Preparación del montaje 3. Compruebe el entrehierro en el elemento de amarre y, si es necesario, mida la alineación del motor (excentricidad): • El entrehierro entre las dos partes del elemento de amarre debe ser visible en todo el perímetro.
- Página 88 4.4 Montaje insertable 4. Montaje del brazo de reacción Siemens: Atornille el brazo de reacción Siemens a la máquina después de haber realizado correctamente los pasos 1 a 3. Tornillos de montaje (todos los tornillos mostrados en verde en esta figura)
- Página 89 Montaje 4.4 Montaje insertable Figura 4-10 1FW3150 Brazo de reacción Siemens, plano acotado 510.20315.01 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 90 Montaje 4.4 Montaje insertable Figura 4-11 1FW320 Brazo de reacción Siemens, plano acotado 510.35320.01 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 91 Montaje 4.4 Montaje insertable Figura 4-12 1FW328 Brazo de reacción Siemens, plano acotado 510.38328.01 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 92: Elemento De Amarre En El Lado Del Eje
En este capítulo se muestran diferentes posibilidades de montaje con elementos de amarre. Para la unión de forma por fricción de los motores torque a ejes de máquina cilíndricos con seguridad, Siemens AG, en colaboración con la empresa RINGSPANN GmbH, ha desarrollado varios sistemas de amarre con los siguientes propósitos: •... -
Página 93: Montaje De Los Elementos De Amarre De La Opción +Q30
Montaje 4.4 Montaje insertable Montaje de los elementos de amarre de la opción +Q30 Resalte del eje Gorrón del eje Casquillo cónico Tornillo extractor Anillo cónico Tuerca de seguridad Tornillo tensor Procedimiento 1. Monte el motor con el elemento de amarre (si fuera necesario, con el casquillo de centraje) en la posición prevista de la extensión del eje. -
Página 94: Posibilidades Para Optimizar La Suavidad De Marcha Del Montaje
Montaje 4.4 Montaje insertable Posibilidades para optimizar la suavidad de marcha del montaje Puede comprobar la concentricidad del sistema durante los procedimientos 2 y 3. El motor se alinea apretando los tornillos (3) de manera específica. Si un tornillo tensor (3) se aprieta de forma desproporcionada, el motor se levanta de la extensión del eje. -
Página 95: Eje Insertable Con Opción +Q30
Montaje 4.4 Montaje insertable 4.4.2.1 Eje insertable con opción +Q30 Disponible para motores 1FW315☐, 1FW320☐ y 1FW328☐ con eje insertable (15.º dígito de la referencia = S) Apoyo en el DE con asiento integrado para permitir un montaje centrado. Si el gorrón del eje se ha realizado según los planos acotados 510.31315.01/510.33320.01/510.31396.01, también es posible el desmontaje con los tornillos extractores. - Página 96 Montaje 4.4 Montaje insertable Figura 4-14 Plano acotado del montaje del motor insertable 1FW315 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 97 Montaje 4.4 Montaje insertable Figura 4-15 Plano acotado del montaje del motor insertable 1FW320 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 98 Montaje 4.4 Montaje insertable Figura 4-16 Plano acotado del montaje del motor insertable 1FW328 Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 99: Eje Hueco Con Opción +Q30
Montaje 4.4 Montaje insertable 4.4.2.2 Eje hueco con opción +Q30 1FW315☐-☐☐☐☐☐-☐☐A☐ 1FW320☐-☐☐☐☐☐-☐☐A☐ • Sistema de amarre adaptado • Para ejes huecos por los que pasan fluidos calientes o fríos • Se requiere espacio de montaje axial en DE • Posibilidad de montaje exclusivamente desde DE o, alternativamente, en dos partes desde DE y NDE •... - Página 100 Montaje 4.4 Montaje insertable Figura 4-18 Plano acotado de eje hueco con elemento de amarre Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 101: Eje Hueco, Elemento De Amarre Interior
Montaje 4.4 Montaje insertable 4.4.2.3 Eje hueco, elemento de amarre interior 1FW315☐-☐☐☐☐☐-☐☐C☐ 1FW320☐-☐☐☐☐☐-☐☐C☐ Figura 4-19 Sistema de amarre interior • Disponible para motores 1FW315☐ y 1FW320☐ con eje especial (15.º dígito de la referencia = C) • RINGSPANN RTM 134.1 •... - Página 102 Montaje 4.4 Montaje insertable Soporte técnico de RINGSPANN GmbH La empresa RINGSPANN GmbH puede ayudarlo a seleccionar un sistema de amarre apropiado para su aplicación. RINGSPANN GmbH Teléfono: +49 (0) 6172 275 0 Schaberberg 30-34 Internet: http://www.ringspann.de 61348 Bad Homburg, Alemania Figura 4-20 Plano acotado de eje hueco con elemento de amarre Motores torque completos 1FW3...
-
Página 103: Montaje Acoplado
Montaje 4.5 Montaje acoplado Montaje acoplado Ventaja: Diseño sencillo, se puede usar un motor estándar. Inconveniente: debido a su función, el acoplamiento debe ser flexible, lo cual afecta negativamente a las ventajas de una carga accionada directamente. El acoplamiento reduce la rigidez de la cadena cinemática. -
Página 104: Sin Cojinetes En De
Montaje 4.6 Sin cojinetes en DE Sin cojinetes en DE La opción "Sin cojinetes DE" se designa con un "3" en el 16.º dígito de la referencia. 1FW3☐☐☐-☐☐☐☐☐-☐☐☐3 Propiedades • Montaje rígido de rotor y estátor para las versiones con "eje hueco" o "eje insertable". •... -
Página 105: Ejemplos De Montaje
Siemens no otorga ninguna garantía ni será responsable de ninguna reclamación derivada o relacionada con la combinación con o con la incorporación en el motor de cualquier otro producto, componente o máquina; el cliente exonera a Siemens de cualquier reclamación de terceros. - Página 106 Montaje 4.6 Sin cojinetes en DE Figura 4-23 Plano acotado, sin cojinetes en DE Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 107: Eje Insertable Y De Sin Cojinetes
Montaje 4.7 Eje insertable y DE sin cojinetes Eje insertable y DE sin cojinetes Instrucciones de montaje El motor se suministra con un anillo de transporte en NDE. El anillo de transporte se encuentra entre el encóder y el escudo portacojinete. El anillo de transporte evita que el eje de motor toque el encóder. -
Página 108: Procedimiento
Montaje 4.8 Desmontaje/montaje del encóder Procedimiento 1. Antes de montar el motor, retire el encóder y el anillo de transporte tal y como se indica en la siguiente descripción "Desmontaje/montaje del encóder". 2. Al montar el motor, asegure que la posición axial del eje del motor a través del espacio libre del encóder sea conforme con el plano acotado 609.30284.01. - Página 109 Montaje 4.8 Desmontaje/montaje del encóder 1 Desmontaje 1. Deje el motor sin tensión. 2. Retire el cable del encóder. Encóder Cuatro tornillos de fijación Elemento de acoplamiento Anillo de transporte 3. Suelte los cuatro tornillos de fijación del encóder. 4. Retire el encóder, el anillo de transporte y el elemento de acoplamiento. Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
- Página 110 Montaje 4.8 Desmontaje/montaje del encóder 2 Montaje 1. Una el elemento de acoplamiento al cubo de acoplamiento del eje del motor. 2. Alinee el cubo de acoplamiento en el encóder con el elemento de acoplamiento del motor. El encóder con cubo de acoplamiento solo puede insertarse en una posición determinada. Encóder Cuatro tornillos de fijación Elemento de acoplamiento...
-
Página 111: Frecuencia Propia Tras El Montaje
Montaje 4.9 Frecuencia propia tras el montaje El estado de ajuste real de un encóder absoluto se muestra en los datos de máquina siguientes: Con SINUMERIK Con SINAMICS MD34210 §MA_ENC_REFP_STATE (estado de p2507 (estado de ajuste de encóder absoluto) encóder absoluto) •... -
Página 112: Resistencia A Vibraciones
Montaje 4.10 Resistencia a vibraciones 4.10 Resistencia a vibraciones Los factores siguientes afectan al comportamiento vibracional del sistema en el lugar de instalación: • Elementos de salida • Situación de montaje • Alineación e instalación • Efectos de vibraciones externas En consecuencia, los valores de vibración del motor pueden aumentar. -
Página 113: Montaje De Sensores De Vibración (Opción Z G50)
Montaje 4.11 Montaje de sensores de vibración (opción Z G50) 4.11 Montaje de sensores de vibración (opción Z G50) El escudo portacojinetes y los adaptadores de los motores cuentan con orificios M8 para atornillar sensores de vibración. Según el tipo de motor, se suministran adaptadores para la conexión de sensores M8. Verá esta información en la siguiente figura "Posición y dimensiones de los orificios para sensores de vibración". - Página 114 Montaje 4.11 Montaje de sensores de vibración (opción Z G50) Figura 4-26 Posición y dimensiones de los orificios para sensores de vibración Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 115: Heavy Duty (Opción Z L03)
Válido para los siguientes motores torque completos Tipo constructivo: IM B5 Puede obtener más información sobre nuestros motores Heavy Duty en Internet: "SIMOTICS T Heavy Duty (https://w3app.siemens.com/mcms/infocenter/content/en/Pages/order_form.aspx?nodeKey=k ey_522170&infotype=brochures)". Planos acotados Encontrará los planos acotados de los motores en el Manual de configuración de 1FW3. -
Página 116: Adaptación Del Eje
Montaje 4.12 Heavy Duty (opción Z L03) Resistencia a choques Tabla 4- 6 Resistencia a choques Aceleración de vibración a pico Resistencia máxima admisible a choques radiales 100 m/s Resistencia máxima admisible a choques axiales 50 m/s Se debe evaluar la aceleración de vibración como valor de pico en el dominio del tiempo, en la banda de frecuencias de 0 a 2000 Hz. -
Página 117: Intervalos De Cambio De Cojinetes Y Reengrase
• Para evitar corrientes entre el rotor y tierra se debe procurar una buena conexión metálica entre el motor y la máquina del cliente (carcasa y eje). Si eso se puede garantizar, póngase en contacto con su oficina de Siemens responsable. • Utilice únicamente cables apantallados de potencia y de señal. -
Página 118: Motor Sin Elemento De Salida
Montaje 4.13 Montaje de los elementos de salida ADVERTENCIA Peligro de muerte por elementos de salida giratorios sin guardas Los elementos de salida giratorios expuestos pueden causar lesiones graves. • Cubrir todos los elementos de salida expuestos con una guarda adecuada. Figura 4-27 Calado y extracción de los elementos de salida;... -
Página 119: Conexión Mecánica Del Sistema De Agua De Refrigeración
Montaje 4.14 Conexión mecánica del sistema de agua de refrigeración 4.14 Conexión mecánica del sistema de agua de refrigeración Las tomas de entrada y salida del suministro de agua de refrigeración se encuentran en la camisa refrigeradora, en el DE y el NDE. Procedimiento 1. - Página 120 Montaje 4.14 Conexión mecánica del sistema de agua de refrigeración Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 121: Conexión
Conexión Notas de seguridad para las conexiones eléctricas ADVERTENCIA Riesgo de descarga eléctrica Existe un riesgo de descargas eléctricas si se establece incorrectamente una conexión eléctrica. • Trabaje en las conexiones eléctricas solo si está cualificado adecuadamente. • Realice todos los trabajos en el motor con el sistema sin tensión. •... -
Página 122: Esquemas De Neutro Admisibles
Conexión 5.2 Esquemas de neutro admisibles ADVERTENCIA Peligro de muerte debido a descarga eléctrica Debido a los imanes permanentes del rotor, cuando los motores giran se induce una tensión. Si se utilizan conexiones para cables defectuosas, se puede sufrir una descarga eléctrica. -
Página 123: Esquema Eléctrico Del Motor
Conexión 5.3 Esquema eléctrico del motor Esquema eléctrico del motor El esquema eléctrico del motor presenta este aspecto: Figura 5-1 Esquema eléctrico de un motor E/S de accionamiento SINAMICS Terminal Module Motores sin interfaz DRIVE-CLiQ Control Unit Motores con interfaz DRIVE-CLiQ Panel de operador Cable de potencia MOTION-CONNECT Smart Line Module o Active Line Modu-... -
Página 124: Información De Conexión
Conexión 5.5 Información de conexión Información de conexión Nota La compatibilidad del sistema solo queda garantizada si se utilizan cables de potencia apantallados cuya pantalla esté conectada en una gran superficie a la caja de bornes metálica del motor (con pasacables CEM metálicos) de forma que se establezca una buena conexión eléctrica. -
Página 125: Conexión De Conductores De Puesta A Tierra
Conexión 5.5 Información de conexión Tabla 5- 1 Distancias en aire mínimas Tensión en bornes máxima <600 V <1000 V Distancias en aire mínimas 5,5 mm 8 mm • Apriete las uniones atornilladas de las conexiones eléctricas con los pares especificados: Tabla 5- 2 Pares de apriete Ø... -
Página 126: Protección De Motor Y Cables
Conexión 5.5 Información de conexión Protección de motor y cables ATENCIÓN Daños debidos a sobrecargas en cables Si la potencia eléctrica se transmite por varios cables conectados en paralelo y falla uno de esos cables, el resto de los cables de motor se puede sobrecargar. •... -
Página 127: Conexión Del Motor
Conexión 5.6 Conexión del motor Sección Intensidad eficaz admisible; AC 50/60 Hz o DC según tipo de tendido B1 [A] B2 [A] C [A] E [A] Potencia (según IEC 60364-5-52) >185 Los valores deben consultarse en la norma Valores extrapolados Tabla 5- 5 Factores de reducción para cables de potencia y de señal Temperatura ambiente del aire [°C]... -
Página 128: Conexión De Potencia
Conexión 5.7 Conexión de potencia Conexión de potencia ATENCIÓN Daños térmicos en cables Los cables pueden sufrir daños térmicos sin no son adecuados para la corriente requerida. • Considere escrupulosamente la intensidad que consume el motor en la aplicación particular. Dimensione los cables de conexión adecuadamente según IEC 60204-1 (vea la tabla "Secciones de cable e intensidad admisible"). - Página 129 Conexión 5.7 Conexión de potencia N.º Descripción N.º Descripción N.º Descripción Espárragos de conexión 3 x M5 Tornillo de puesta a tierra M6 Tornillos de puesta a tierra 2 x M12 Espárragos de conexión 3 x M10 Tornillo de puesta a tierra M10 Espárragos de conexión 12 x M16 Tornillo de puesta a tierra M4 Tornillos de puesta a tierra 4 x M16...
- Página 130 Conexión 5.7 Conexión de potencia Confección de cables de potencia Corte los conductores de los cables de potencia correspondientes a las conexiones en la caja de bornes. Figura 5-6 Ejemplo de longitudes de conductor adaptadas para conexión en la caja de bornes Tabla 5- 6 Secciones (Cu) y diámetros exteriores de cables de conexión en ejecución estándar Altura...
- Página 131 Conexión 5.7 Conexión de potencia Nota Los cables de potencia MOTION-CONNECT 500 están disponibles con secciones de hasta 120 mm² y los MOTION-CONNECT 800PLUS de hasta 50 mm Los cables mencionados han sido homologados por UL o CSA. Las homologaciones se pueden consultar en el capítulo "Sistema de conexión MOTION- CONNECT"...
-
Página 132: Motores Con Interfaz Drive-Cliq
Conexión 5.8 Motores con interfaz DRIVE-CLiQ Motores con interfaz DRIVE-CLiQ Los motores para el sistema de accionamiento SINAMICS están equipados con un Sensor Module interno que contiene la evaluación de los sensores y la temperatura, así como una placa de características electrónica. Este Sensor Module está montado en lugar del conector de señales y tiene un conector hembra RJ45 plus de 10 pines. -
Página 133: Notas Sobre El Manejo Del Conector Rj45
Conexión 5.9 Notas sobre el manejo del conector RJ45 Notas sobre el manejo del conector RJ45 El método de conexión DRIVE-CLiQ con el conector RJ45 consta de estos componentes: Conector macho DRIVE-CLiQ con conector macho RJ45 Conector hembra DRIVE-CLiQ con conector hembra RJ45 Anillo giratorio de bloqueo Pestillos de resorte (2, opuestos) Resaltes (2, opuestos) - Página 134 Conexión 5.9 Notas sobre el manejo del conector RJ45 2. Inserte el conector en la hembra RJ45 del Sensor Module. El anillo de bloqueo permanece en la posición de bloqueo. 3. Compruebe que los dos pestillos de resorte estén encajados en ambos resaltes del conector hembra y que no se pueda extraer el conector.
- Página 135 Conexión 5.9 Notas sobre el manejo del conector RJ45 Desmontaje Procedimiento 1. Gire en sentido antihorario el anillo de bloqueo hasta la posición de desbloqueo. Gire en sentido antihorario el anillo de bloqueo. → Los dos pestillos de resorte se separan de los resaltes. 2.
-
Página 136: Motores Sin Interfaz Drive-Cliq
Conexión 5.10 Motores sin interfaz DRIVE-CLiQ 5.10 Motores sin interfaz DRIVE-CLiQ En los motores sin interfaz DRIVE-CLiQ, el encóder de velocidad y los sensores de temperatura se conectan a través de un conector de señal. Conector de señal para eje hueco Conector de señal para eje macizo o eje inser- table conector de señal... -
Página 137: Giro Del Conector En El Motor
Conexión 5.11 Giro del conector en el motor Los motores sin DRIVE-CLiQ necesitan un Sensor Module Cabinet (SMC) para funcionar con un sistema de accionamiento SINAMICS S120. Conecte el motor al SMC con un cable de señal. Conecte el SMC al motor con un cable MOTION-CONNECT. Figura 5-9 Interfaz de encóder sin DRIVE-CLiQ 5.11... -
Página 138: Conexión Del Sensor De Temperatura En Motores Sin Drive-Cliq
Conexión 5.12 Conexión del sensor de temperatura en motores sin DRIVE-CLiQ 5.12 Conexión del sensor de temperatura en motores sin DRIVE-CLiQ Conecte el sensor de temperatura al conector de señal junto con la señal del encóder de velocidad. Vea también el capítulo "Motores sin interfaz DRIVE-CLiQ (Página 134)". Con versiones de motor sin encóder, conecte con el pasacables y el borne en la caja de bornes. - Página 139 Conexión 5.13 Conexión de sensores de temperatura Borne Figura 5-10 Conexión para PTC triple Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 140: Esquema De Conexiones Para Sensores De Temperatura
Conexión 5.13 Conexión de sensores de temperatura Esquema de conexiones para sensores de temperatura Figura 5-11 Esquema de conexiones para sensores de temperatura (sin SMI) Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA... -
Página 141: Tendido De Cables En Entornos Húmedos
Conexión 5.14 Tendido de cables en entornos húmedos 5.14 Tendido de cables en entornos húmedos Nota Tendido de cables en entornos húmedos Si el motor se va a montar en un entorno húmedo, se deben tender los cables de potencia y de señal como se muestra en la figura siguiente. -
Página 142: Apantallado, Puesta A Tierra Y Conexión Equipotencial
• Conecte la pantalla del cable de potencia a la conexión de pantalla del Power Module. Nota Tenga en cuenta las directrices de montaje CEM del fabricante del convertidor. En el caso de los convertidores de Siemens, pueden solicitarse con la referencia de documento 6FC5297- ☐AD30-0☐P☐. Motores torque completos 1FW3... -
Página 143: Puesta En Marcha
Puesta en marcha Instrucciones de seguridad para la puesta en marcha ADVERTENCIA Riesgo de descarga eléctrica debido a tensiones residuales Existe un riesgo de descarga eléctrica si hay tensiones residuales peligrosas en las conexiones del motor. Incluso después de desconectar la alimentación eléctrica, en las piezas del motor bajo tensión puede haber una carga superior a 60 μC. -
Página 144: Listas De Comprobación Para La Puesta En Marcha
• Vigile las temperaturas admisibles de entrada de agua. • Si el motor tiene que funcionar sin refrigeración por agua, aclare la situación con la oficina local de Siemens. Listas de comprobación para la puesta en marcha Nota Comprobaciones necesarias Es posible que las listas siguientes no sean completas. - Página 145 Puesta en marcha 6.2 Listas de comprobación para la puesta en marcha • Realice la puesta en marcha del sistema de accionamiento según las instrucciones de servicio del convertidor que se utilice. • Familiarícese a fondo con las instrucciones de seguridad. •...
- Página 146 Puesta en marcha 6.2 Listas de comprobación para la puesta en marcha Tabla 6- 3 Lista de comprobación (3): comprobaciones referentes a la refrigeración por agua Comprobación ¿El suministro de agua de refrigeración está conectado y listo para funcionar? ¿La circulación del agua de refrigeración (caudal, temperatura) cumple las especifica- ciones? ¿Están las tuberías de refrigeración limpias y libres de toda contaminación? Si es necesario, enjuague las tuberías de refrigeración antes de conectar los motores y...
-
Página 147: Comprobación De La Resistencia De Aislamiento
Puesta en marcha 6.3 Comprobación de la resistencia de aislamiento Comprobación de la resistencia de aislamiento Tras un periodo prolongado de almacenamiento o parada es necesario medir con tensión DC la resistencia de aislamiento entre los devanados y tierra. ADVERTENCIA Peligro de muerte debido a descarga eléctrica En algunos casos, durante e inmediatamente después de la medición, los bornes presentan niveles peligrosos de tensión que pueden provocar la muerte en caso de contacto. -
Página 148: 6.4 Conexión
Puesta en marcha 6.4 Conexión Nota Limpieza o secado de los devanados al alcanzar la resistencia de aislamiento crítica Si la resistencia de aislamiento crítica es inferior o igual a ese valor, los devanados deben secarse, o bien, si se retira el ventilador, se deben limpiar y secar concienzudamente. Después de secar los devanados limpios, tener en cuenta que la resistencia de aislamiento es menor cuando el devanado está... -
Página 149: Funcionamiento
• Vigile las temperaturas admisibles de entrada de agua. • Si el motor tiene que funcionar sin refrigeración por agua, aclare la situación con la oficina local de Siemens. ATENCIÓN Daños debidos a condensación A consecuencia de fuertes variaciones de la temperatura ambiente, radiación solar directa y una humedad relativa alta, puede acumularse agua de condensación en la máquina. -
Página 150: Periodos De Parada
Funcionamiento 7.2 Periodos de parada ADVERTENCIA Peligro de muerte debido a cubiertas abiertas o eliminadas Las piezas rotativas o bajo tensión constituyen peligros potenciales. Las cubiertas, por ejemplo, tienen estas funciones: • Protección contra contacto con piezas bajo tensión • Protección contra contacto con piezas giratorias •... -
Página 151: Conexión Y Desconexión
Funcionamiento 7.3 Conexión y desconexión Conexión y desconexión Nota DESCONEXIÓN DE EMERGENCIA A fin de evitar accidentes, infórmese sobre la función de DESCONEXIÓN DE EMERGENCIA antes de conectar el sistema. El motor se conecta y desconecta en el convertidor. • Encontrará más información sobre este tema en el capítulo respectivo de las instrucciones de servicio del convertidor. -
Página 152: Fallos
Funcionamiento 7.4 Fallos Fallos En caso de desviaciones respecto al funcionamiento normal, o bien si aparecen fallos, proceda inicialmente según la lista siguiente. Mientras lo hace, consulte los capítulos pertinentes de la documentación acerca de los componentes del sistema de accionamiento completo. ADVERTENCIA Peligro de muerte por equipos o dispositivos de protección no funcionales Si los equipos o dispositivos de protección no funcionan, se puede provocar la muerte,... - Página 153 Si tras aplicar las medidas anteriores no es posible subsanar el fallo, ponerse en contacto con el fabricante o con el centro de asistencia Siemens. Consulte los datos de contacto en "Soporte técnico" del capítulo "Introducción".
- Página 154 Funcionamiento 7.4 Fallos Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 155: Mantenimiento
Mantenimiento Instrucciones de seguridad sobre el mantenimiento ADVERTENCIA Riesgo de lesiones debido a movimiento giratorio inesperado Si, con el motor conectado, se trabaja en el área de rotación del motor y este gira accidentalmente, se puede ocasionar la muerte, lesiones o daños materiales. •... -
Página 156: Reparación
Siemens. Encargue la reparación del motor a un centro de asistencia Siemens. Consulte los datos de contacto en "Soporte técnico" del capítulo "Introducción". -
Página 157: Condiciones De Servicio E Intervalos De Mantenimiento
A fin de minimizar los tiempos de parada y poder llevar a cabo las reparaciones de forma rápida, económica y segura, se están autorizando otros centros regionales para la reparación de motores. Consulte los datos de contacto del centro de asistencia Siemens en "Soporte técnico" del capítulo "Introducción". Motores torque completos 1FW3... -
Página 158: Intervalos De Cambio De Cojinetes
Mantenimiento 8.3 Inspección y mantenimiento 8.3.2 Intervalos de cambio de cojinetes Vida útil de los cojinetes e intervalos de reengrase Los cojinetes de los motores torque completos están provistos de lubricación permanente y diseñados para una temperatura ambiente mínima de funcionamiento de -15 °C. Nota Cojinetes sin dispositivo de reengrase En caso de usar cojinetes sin dispositivo de reengrase (SH 150 y SH 200), se recomienda... - Página 159 Mantenimiento 8.3 Inspección y mantenimiento Motor Intervalo de cambio de coji- Intervalos de netes con reengrase [h] reengrase [h] 1FW328❑-2 n = eje macizo 150/250 40000 10000 1FW328❑-3 n = eje macizo 400 40000 8000 1FW328❑-3 n = eje macizo 600 40000 8000 1FW328❑-3 n...
-
Página 160: Versiones Especiales
Algunos factores desfavorables, como peculiaridades del montaje, altas velocidades, modos de operación especiales o altas exigencias mecánicas, pueden exigir en algunos casos un tratamiento especial. Para ello, consulte a la oficina local de Siemens, indicando las condiciones generales aplicables. Motores torque completos 1FW3... -
Página 161: Comprobación Del Agua De Refrigeración
8.4.1 Sustitución de un encóder en motores con DRIVE-CLiQ Sustitución de un encóder programado A través del centro de asistencia Siemens puede pedir un encóder programado nuevo indicando la referencia y el número de serie. ADVERTENCIA Peligro de muerte por movimientos incontrolados debidos a datos de motor incorrectos Para el sistema de accionamiento SINAMICS S120 hasta la versión 4.2, cuando se cambie el... - Página 162 Mantenimiento 8.4 Sustitución de un encóder Procedimiento 1. Sustituya el encóder* programado para este motor como se describe en el capítulo "Sustitución en serie de encóders (Página 162)". 2. Conecte el motor. Ha sustituido el encóder. ❒ *) Con encóders absolutos, la información de posición del encóder debe ajustarse al sistema mecánico de la máquina (ajuste de encóder absoluto) Sustitución de un encóder no programado A partir de la versión 4.3 del sistema de accionamiento SINAMICS S120, se pueden usar...
- Página 163 Programe el encóder utilizando el Manual de servicio técnico "Sustitución de encóders para 1FK7 G2 y 1FT7" (https://support.industry.siemens.com/cs/document/99457853/replacing-an- encoder-for-simotics-s-1fk7-g2-s-1fg1-and-s-1ft7?dti=0&pnid=13308&lc=en-WW). Si tiene alguna pregunta, consulte a la oficina local de Siemens. Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 164: Sustitución En Serie De Encóders
Mantenimiento 8.4 Sustitución de un encóder 8.4.2 Sustitución en serie de encóders Procedimiento Nota Si debe sustituir varios encóders, hágalo siempre de uno en uno. Así se evitan confusiones y se descartan errores de programación. 1 Desmontaje 1. Desconecte el motor. 2. - Página 165 Mantenimiento 8.4 Sustitución de un encóder 2 Instalación 1. Una el elemento de acoplamiento al cubo de acoplamiento del eje del motor. 2. Alinee el cubo de acoplamiento en el encóder con el elemento de acoplamiento del motor. El encóder con cubo de acoplamiento solo puede insertarse en una posición determinada. Módulo de encóder Cuatro tornillos de fijación Elemento de acoplamiento...
- Página 166 Mantenimiento 8.4 Sustitución de un encóder ADVERTENCIA Peligro de muerte si el encóder no está instalado correctamente, o si los dispositivos de seguridad no funcionan Si el encóder o cualquier otra pieza de la máquina no están instalados correctamente, o si uno de los equipos o dispositivos de seguridad no funciona, se puede ocasionar la muerte o lesiones.
-
Página 167: Retirada Del Servicio Y Eliminación
• Si usted es una de esas personas (con marcapasos o implante), no se acerque a menos de 300 mm de un motor abierto. • Solo un centro de asistencia Siemens debe desmontar el rotor. ATENCIÓN Pérdida de datos a causa de fuertes campos magnéticos Si se encuentra cerca del rotor y lleva consigo algún soporte de datos magnético o... -
Página 168: Retirada Del Servicio
Retirada del servicio y eliminación 9.2 Retirada del servicio ADVERTENCIA Lesiones debidas a cargas suspendidas Mientras se está desarmando y transportando, el motor puede provocar lesiones con sus movimientos. • Utilice únicamente equipos de suspensión de carga o elevación que funcionen perfectamente y que están dimensionados para soportar la masa del motor. -
Página 169: Eliminación
Retirada del servicio y eliminación 9.3 Eliminación Eliminación Envíe el motor a una empresa autorizada para su desarme y eliminación, o bien envíe el motor completo al fabricante. A continuación, se proporcionan recomendaciones para la eliminación respetuosa con el medio ambiente de los componentes y materiales. Siga la normativa local de eliminación y gestión de residuos. - Página 170 Retirada del servicio y eliminación 9.3 Eliminación Motores torque completos 1FW3 Instrucciones de servicio, 08/2020, A5E46027719E AA...
-
Página 171: Anexo
Anexo Descripción de términos Par nominal M Par continuo térmicamente admisible en servicio S1 a la velocidad nominal del motor. Velocidad nominal n El rango de velocidad característico del motor se define por la velocidad nominal en la gráfica de velocidad-par. Intensidad nominal I Valor eficaz de la corriente de fase del motor para generar el par nominal pertinente. -
Página 172: Constante De Tiempo Eléctrica T
Anexo A.1 Descripción de términos Nota Al ignorar las pérdidas en el motor, esta constante no es válida al configurar las intensidades nominal y de aceleración necesarias. En el cálculo deben considerarse la carga continua y los pares de fricción. Constante de tiempo eléctrica T Cociente entre la inductancia del campo giratorio y la resistencia del devanado. -
Página 173: Constante De Tiempo Mecánica T
Anexo A.1 Descripción de términos Constante de tiempo mecánica T La constante de tiempo mecánica se obtiene a partir de la tangente con una función de rampa teórica por el origen. = 3 ∙ R ∙ J Momento de inercia del servomotor [kgm Resistencia por fase del devanado del estátor [Ohm] Constante de par [Nm/A] Lado contrario al accionamiento... -
Página 174: Número De Identificación De Documento Del Manual De Configuración
Anexo A.2 Número de identificación de documento del Manual de configuración Rigidez a la torsión del eje c Especifica la rigidez a la torsión del eje desde el centro del paquete de chapas del rotor hasta el centro del extremo del eje. Resistencia del devanado R con una temperatura del devanado de 20 °C Valor de la resistencia de una fase cuando la temperatura del devanado es de 20 °C. -
Página 175: Índice Alfabético
Caja de bornes, 126 Campos de aplicación, 20 Instrucciones de seguridad Características técnicas, 23 Conexión eléctrica, 120 Centro de asistencia Siemens, 4 Funcionamiento, 142, 147, 154 Certificados Mantenimiento, 153 Declaración de conformidad CE, 23 Puesta en marcha, 119, 141, 153 EAC, 22 Retirada del servicio y eliminación, 165... - Página 176 Índice alfabético Refrigeración por agua, 40 Conexión, 41 Datos técnicos, 42 Resistencia a vibraciones, 110 Resistencias de freno, 48 Resólver, 37 RoHS, 22 Soporte técnico, 4 Sustitución de la interfaz DRIVE-CLiQ, 32 Sustitución de un encóder, 106, 159 Termistor PTC, 30 Tipos de construcción, 78 Transporte, 71 Utilización para la finalidad prevista, 20...